
Rapport d'enquête aéronautique A08Q0051
Condition non compensée en piqué menant à une perte de maîtrise
du Airbus A310-308 C-GPAT
exploité par Air Transat
à l'aéroport international de Québec/Jean-Lesage
(Québec)
le
Le Bureau de la sécurité des transports du Canada (BST) a enquêté sur cet événement dans le but de promouvoir la sécurité des transports. Le Bureau n’est pas habilité à attribuer ni à déterminer les responsabilités civiles ou pénales. Le présent rapport n’est pas créé pour être utilisé dans le contexte d’une procédure judiciaire, disciplinaire ou autre. Voir Propriété et utilisation du contenu.
-
Table des matières
Résumé
L'Airbus A310-308, immatriculé C-GPAT, numéro de série 597, exploité par Air Transat effectue le vol TSC211 entre l'aéroport international de Québec/Jean-Lesage et l'aéroport international de Montréal/Pierre-Elliott-Trudeau (Québec). Vers 14 h 39, heure normale de l'Est, TSC211 est autorisé à décoller de la piste 06 puis à monter jusqu'à 3000 pieds au-dessus du niveau de la mer (asl) sur un cap magnétique de 110°. L'appareil prend son envol à 182 nœuds, 44 nœuds au-dessus de la vitesse de rotation calculée. Lors de la montée, la vitesse verticale atteint 6300 pieds par minute avec une assiette de cabré de 19°. En vue de la mise en palier, le pilote aux commandes utilise le compensateur électrique pour compenser en piqué. L'appareil arrête sa montée à 3100 pieds asl et amorce une descente vers l'altitude assignée. Cependant, à 3000 pieds asl, l'avion du vol TSC211 qui se trouve en condition non compensée poursuit sa descente jusqu'à 1300 pieds asl avant que la maîtrise en tangage soit reprise. L'équipage déclare une urgence. L'appareil poursuit sa route vers Montréal où il atterrit sans problème. L'inspection de l'appareil ne révèle ni dommage ni anomalie. Personne n'est blessé.
1.0 Renseignements de base
1.1 Déroulement du vol
Le vol 211 d'Air Transat (TSC211)Footnote 1 effectue le deuxième segment d'un vol de deux étapes. Plus tôt dans la journée, l'Airbus A310-308 exploité par Air Transat en provenance de l'aéroport international de Paris-Charles de Gaulle en France a atterri à l'aéroport international de Québec/Jean-Lesage (Québec) où 134 passagers ont débarqué. Après l'escale, l'appareil doit se rendre à l'aéroport international de Montréal/Pierre-Elliott-Trudeau (Québec) avec à son bord 9 membres d'équipage et 89 passagers. Vers 14 h 15Footnote 2, le contrôle au sol de l'aéroport de Québec autorise TSC211 à destination selon le départ normalisé aux instruments SID 2Footnote 3 de la piste 06.
Pendant que l'avion circule en direction de la piste, l'équipage vérifie les commandes de vol. Aucune anomalie n'est constatée lors de la vérification de la gouverne de profondeurFootnote 4. Le plan horizontal réglable (THS) est réglé à 1,9° en cabréFootnote 5 à l'aide du compensateur électrique, et les becs de bord d'attaque/volets sont placés à la position 15/15Footnote 6.
À 14 h 38, l'équipage reçoit de nouvelles instructions de départ. Après avoir décollé de la piste 06, l'appareil doit tourner à droite sur un cap magnétique de 110°, arrêter sa montée à 3000 pieds au-dessus du niveau de la mer (asl) et une fois établi sur le cap, l'équipage doit contacter le terminal de Québec. Suite à cette nouvelle instruction, l'équipage passe en revue la procédure de la compagnie de mise en palier à basse altitude.
À 14 h 39, le commandant de bord qui est le pilote aux commandes (PF) enclenche les « Go Levers Footnote 7 », et la puissance augmente jusqu'à la poussée cible, 100 % N1Footnote 8 en conformité avec les directives pour décollage sur piste contaminée. La portée visuelle de piste (RVR) de la piste 06 est mesurée à 1800 pieds, le vent est du 090 °M à 24 nœuds avec des rafales à 32 nœuds. Lors de la course au décollage, le casque d'écoute du copilote se débranche partiellement (voir 1.8.5), ce qui l'empêche d'avertir le commandant de bord que l'appareil a atteint la VrFootnote 9. L'appareil accélère rapidement et le commandant de bord effectue la rotation à 182 nœuds après l'annonce du copilote.
À 14 h 40 min 4, TSC211 prend son envol. Trois secondes plus tard, à environ 40 pieds au-dessus du sol (agl), soit environ 260 pieds asl, l'appareil amorce un virage à droite vers le cap assigné de 110 °M.
À 14 h 40 min 18, le directeur de vol passe du système de référence vitesse (SRS) au mode d'acquisition d'altitude (ALT*)Footnote 10; l'appareil se trouve à 900 pieds agl, le nez est cabré à 19°, le taux de montéeFootnote 11 est d'environ 6300 pieds par minute (pi/min) et la vitesse indiquée est stable à 213 nœudsFootnote 12.
À 1700 pieds asl, le copilote place le levier des volets à la position 15/0 puis rentre le train d'atterrissage. À 1760 pieds asl, le copilote embraye le pilote automatique (PA). Cinq secondes plus tard, le commandant de bord le débraye. L'alarme sonore de débrayage du PA se déclenche et retentit pendant une partie de l'incident.
À 2350 pieds asl, la puissance des moteurs est réduite momentanément et atteint 87 % N1 avant d'augmenter à 98 % N1. À 3000 pieds, le taux de montée est de 3100 pi/min, et le THS passe de 0,3° en piqué à 2,7° en piquéFootnote 13.
À 14 h 40 min 44, l'appareil atteint la fin de sa montée à 3100 pieds asl, puis amorce une descente. Quatre secondes plus tard, l'avion franchit son altitude assignée de 3000 pieds asl à 230 nœuds avec un angle de piqué de 2,8° et un taux de descente d'environ 2000 pi/min. Le copilote avertit avec fermeté le PF que l'avion a une assiette de piqué. Au début de la descente, le PF tire sur le manche, et la gouverne de profondeur oscille entre 6,7° en cabré et 8,7° en cabré. L'angle de tangage de l'avion varie entre 0,4° en cabré et 2,5° en piqué. La descente se poursuit, et la vitesse de l'appareil augmente.
À 14 h 40 min 53, le PF ramène rapidement les manettes de poussée pour ne pas excéder la vitesse maximale volets sortisFootnote 14. En tirant sur les manettes de poussée, le PF appuie sans s'en rendre compte sur les « Go Levers ». Moins d'une seconde après l'activation du mode « Go Around », les becs de bord d'attaque commencent à rentrer, et dès que le PF lâche les manettes de poussée, les manettes de poussée avancent, et la puissance des moteurs augmente momentanément et atteint 99 % N1. La vitesse de l'appareil continue d'augmenter, et dans une assiette de piqué de 2,8°, l'avion franchit 2800 pieds asl avec un taux de descente de 1730 pi/min. Puisque l'assiette de l'avion reste inchangée et que le PF n'a pas répondu à l'avertissement que l'avion avait une assiette de piqué, le copilote fait une seconde annonce.
Pendant que le PF tire sur le manche pour arrêter la descente et réduire la vitesse, il constate avec surprise sur l'annonciateur de mode de vol (FMA) que l'appareil est en mode remise des gaz. À 2750 pieds asl, soit 250 pieds au-dessous de l'altitude cible affichée sur le FCU (flight control unit), l'avertisseur d'altitude retentit, et le voyant avertisseur clignoteFootnote 15. Comme l'appareil continue d'accélérerFootnote 16, le PF conclut que la vitesse indiquée est erronée.
Étant donné qu'il ne perçoit aucun changement au niveau de l'assiette, le copilote annonce au commandant de bord qu'il prend les commandesFootnote 17. Le commandant de bord lâche le manche et, craignant le décrochage, place ses mains devant le manche pour limiter le déplacement du manche vers l'arrière.
À 14 h 40 min 58, le copilote débraye l'automanette et réduit rapidement la puissance à 45 % N1. À peu près au même moment, le premier avertissement de survitesse survient juste avant la rentrée complète des becs de bord d'attaque; l'appareil franchit 2600 pieds asl en descente, l'assiette passe de 2,4° en piqué à 4,2° en piqué, et la vitesse dépasse 259 nœuds.
À 14 h 41 min 5, alors que l'avion poursuit sa descente, le THS passe de 1,8° en piqué à 1,6° en piqué puis à 1,2° en piqué sur une période de 20 secondes. La gouverne de profondeur fluctue entre 8° en cabré et 1,2° en cabré, et l'assiette de l'appareil varie entre 0,8° en piqué et 4,2° en piqué. Pendant ce temps, l'appareil continue d'accélérer et franchit 324 nœuds avec un taux de descente de 1300 pi/min.
À 14 h 41 min 22, l'assiette de l'appareil augmente à 6,7° en piqué. Pendant ce temps, la puissance des moteurs et la gouverne de profondeur sont modulées. Toutefois, le taux de descente augmente jusqu'à 3900 pi/min.
À environ 1454 pieds agl, le système d'avertissement de proximité du sol amélioré (EGPWS) déclenche une alerte « Sink Rate » qui dure quatre secondes. En même temps, à 345 nœuds, un deuxième avertissement de survitesseFootnote 18 d'une durée de 30 secondes retentit.
De 14 h 41 min 35 à 14 h 41 min 43, l'EGPWS déclenche successivement les alertes « Don't Sink », « Terrain », « Sink Rate », l'alarme « Pull Up », et finalement l'alerte « Too LowTerrain ». À 14 h 41 min 39, l'appareil descend momentanément à une altitude minimale indiquée de 1393 pieds (radio altitude de 995 pieds agl), avant d'amorcer une montée.
À 14 h 41 min 45, le THS passe de 1,2° en piqué à 0,8° en piqué. Pendant ce temps, l'appareil atteint la vitesse maximum pendant le vol de 370 nœuds; une sollicitation en cabré est exercée au manche; la puissance augmente de 60 % N1 à 88 % N1, l'appareil adopte une assiette de cabré et amorce une montée.
Sur une période de 39 secondes, alors qu'il tirait sur le manche pour arrêter la descente, le copilote a transmis par inadvertance à 4 reprises sur la fréquence de la tour. L'écoute de ces transmissions a permis de déterminer que les pilotes comprenaient l'urgence de la situation, mais qu'ils n'en comprenaient pas la cause.
À 14 h 42 min 4, le commandant de bord transmet un message d'urgence « PAN PAN » puis déclare avoir un petit problème et demande l'autorisation de monter à 10 000 pieds. Le contrôleur de l'aéroport informe TSC211 qu'il transmet sur la fréquence de la tour. À 14 h 42 min 27, le commandant de bord transmet de nouveau un message d'urgence « PAN PAN » et déclare avoir un problème d'indication de vitesse. Le contrôleur de l'aéroport autorise TSC211 à monter sans restriction et lui rappelle qu'il est toujours sur la fréquence de la tour. L'appareil poursuit sa montée normalement.
Par la suite, TSC211 vérifie son altitude et sa vitesse auprès du contrôleur du terminal de Québec et confirme le bon fonctionnement de l'anémomètre et de l'altimètre de l'avion. Le moniteur électronique centralisé de bord (ECAM) n'a généré aucun message de défectuosité en rapport avec le problème de contrôle de l'avion, et aucun voyant lumineux ni indication dans le poste de pilotage n'a signalé un défaut de fonctionnement de l'avion.
Le commandant de bord reprend les commandes, et l'appareil poursuit le vol vers l'aéroport international de Montréal au niveau de vol 220 à une vitesse réduite de 250 nœuds.
À 14 h 49, TSC211 informe les services de la circulation aérienne (ATS) qu'il annule l'urgence, que tout est revenu à la normale et que le problème était probablement dû à une erreur d'anémomètre. Toutefois, l'équipage n'a pas été en mesure d'identifier pendant le vol la source de la perte de maîtrise. L'appareil a atterri sans autre incident.
1.2 Dommages à l'aéronef
Après l'atterrissage à l'aéroport international de Montréal, l'appareil a fait l'objet d'une inspection en cas de turbulences importantes et de dépassement de la Vmo. L'examen de l'appareil n'a révélé aucun dommage, et aucune anomalie n'a été décelée.
1.3 Renseignements sur le personnel
L'équipage de conduite était composé d'un commandant de bord et d'un pilote vérificateur qui agissait comme copilote. Le pilote vérificateur évaluait les compétences du commandant de bord dans le cadre d'une vérification de compétence en ligne ETOPSFootnote 19.
1.3.1 Le commandant de bord
Le commandant de bord était titulaire d'une licence de pilote de ligne valide. Il travaillait pour la compagnie depuis mars 1997. Il a commencé à travailler comme copilote sur Lockheed L-1011. En 2004, il a obtenu sa qualification sur A310.
En 2007, après avoir satisfait les exigences de la compagnie, il entame sa formation pour passer commandant de bord. Il suit une instruction théorique puis une formation sur simulateur dispensée par des instructeurs d'Air Transat. Le 5 décembre 2007, il réussit le contrôle de compétence pilote (CCP) de commandant de bord sur A310. Le 19 janvier 2008, lors d'un vol d'entraînement en ligne, la procédure d'indication de vitesse erronée est revue. Son dernier vol de vérification pour compétence initiale de commandant de bord exécuté sous la surveillance d'un pilote vérificateur agréé (PVA) a été effectué le 24 janvier 2008. L'ensemble de la formation était conforme au programme de formation de la compagnie. Au moment de l'événement, le commandant de bord avait moins de 100 heures de vol à titre de commandant de bord sur type.
1.3.2 Le copilote
Le copilote était titulaire d'une licence de pilote de ligne valide. Il était au service d'Air Transat depuis 1997. Il a commencé en tant que copilote sur Lockheed L-1011. Il est passé commandant de bord en décembre 2000. En 2001, il a obtenu sa qualification sur A310. Il était instructeur sur A310 depuis février 2002. En novembre 2005, il a été autorisé par Transports Canada à agir à titre de PVA de type B Footnote 20 puis en juin 2006 il est passé PVA de type A. À ce titre, le copilote agissait comme instructeur lors des sessions de formation en simulateur.
1.4 Renseignements météorologiques
Selon l'ATISFootnote 21 de 14 h en vigueur au moment du décollage de l'aéroport de Québec, les conditions météorologiques étaient les suivantes :
- vent du 90 °M à 24 nœuds, rafales à 36 nœuds;
- visibilité de ⅜ de mille, neige, poudrerie basse;
- visibilité verticale de 1700 pieds;
- température de −10 °C, point de rosée de −13 °C, calage altimétrique de 29.54 pouces de mercure;
- poudrerie élevée récente et visibilité variable entre ¼ de mille et ½ mille.
La RVR de la piste 06 était changeante dans les minutes qui ont précédé le décollage. À 14 h 36, la RVR était de 1000 pieds; à 14 h 37, la RVR était de 1400 pieds; et à 14 h 38, la RVR était de 1800 pieds. Des fluctuations de la RVR à intervalles rapprochés constituent un phénomène assez courant pendant les périodes de visibilité réduite dans la neige et poudrerie basse.
La RVR minimale au décollage autorisée pour la piste 06 de l'aéroport de Québec, publiée dans le Canada Air Pilot (CAP), est une RVR de 2600 pieds (½ mille). Air Transat était autorisée en vertu d'une spécification d'exploitationFootnote 22 à décoller avec une RVR de 1200 pieds (¼ de mille)Footnote 23. Cependant, le décollage a été effectué dans des conditions qui ne répondaient pas aux exigences de la spécification d'exploitation :
- aucun aérodrome de dégagement n'était spécifié dans le plan de vol exploitation;
- le commandant de bord totalisait moins de 100 heures de vol sur type à titre de commandant de bord.
L'appareil n'a pas été dégivré avant le décollage puisque les précipitations n'adhéraient pas à ses surfaces. L'enquête a révélé qu'aucun des appareils qui ont précédé le départ de TSC211 n'a été dégivré. L'analyse des données de vol a exclu le givrage comme étant un facteur contributif.
1.5 Renseignements sur l'aérodrome
TSC211 a décollé de la piste 06 de l'aéroport international de Québec. L'élévation de l'aérodrome est de 244 pieds asl. La piste 06 mesure 9000 pieds de longueur sur 150 pieds de largeur. Selon les renseignements ATIS en vigueur au moment du décollage, l'état de la surface de la piste 06 à 14 h était la suivante : l'axe de piste était dégagé sur 130 pieds de largeur dont 55 % était nu et sec; 10 % était recouvert de neige durcie et 35 % était recouvert de congères de 0 à 1 pouce; 40 % du reste de la piste était recouvert de 3 pouces de neige et de 60 % de glace. Le coefficient de frottementFootnote 24 (CRFI) était de 0,49 à 14 h.
1.6 Télécommunications
1.6.1 Services de la circulation aérienne (ATS)
Le contrôleur de l'aéroport a modifié l'autorisation de départ pendant que l'appareil circulait en direction du seuil de la piste. La nouvelle autorisation a été accordée en conformité avec un arrangement entre la tour de Québec et le centre de contrôle régional de Montréal. L'autorisation qui comprenait une modification de cap et d'altitude assurait un espacement immédiat avec un aéronef qui venait de décoller de Québec. De plus, le changement de cap permettait au contrôleur d'autoriser TSC211 à décoller plus tôt, tout en le dirigeant plus vite vers sa destination. Le niveau de trafic au moment du changement d'autorisation était faible. Aucun appareil ne suivait TSC211 pour décoller.
Peu de temps après le décollage, le commandant de bord a lancé un message d'urgence « PAN PAN » sur la fréquence de la tour. Une situation d'urgence est classée selon le degré de danger ou de risque comme suit :
- La détresse est une situation où l'on est menacé par un danger grave ou imminent et l'on demande une assistance immédiate. Le signal de détresse est « MAYDAY » prononcé trois fois.
- L'urgence est une situation où la sécurité d'un aéronef ou d'un autre véhicule ou d'une personne se trouvant à bord ou en vue est compromise, mais qui ne demande pas d'intervention immédiate. Le signal d'urgence est « PAN PAN » prononcé trois fois.
Le contrôleur de l'aéroport a réagi en informant TSC211 qu'il émettait toujours sur la fréquence de la tour et lui a demandé de confirmer la fréquence d'émission. TSC211 a répondu qu'il afficherait la fréquence du terminal de Québec. Cependant, trois secondes plus tard, le commandant de bord a transmis de nouveau « PAN PAN » sur la fréquence de la tour puis a déclaré une urgence, tout en signalant un défaut de fonctionnement de l'anémomètre. Le contrôleur de l'aéroport a aussitôt autorisé TSC211 à monter à l'altitude de son choix et l'a informé de nouveau qu'il transmettait sur la fréquence de la tour de Québec.
Le message « PAN PAN » est rarement utilisé en Amérique du Nord. En général, les équipages informent l'ATS d'un problème en « déclarant une urgence ». Au Canada, il est possible qu'un contrôleur n'entende jamais un message « PAN PAN » ou « MAYDAY » sauf lors de sa formation initiale. La procédure à suivre en cas de message de détresse ou d'urgence n'avait pas été revue lors des derniers stages de recyclage des contrôleurs de la tour de Québec, mais rien n'obligeait que cette procédure soit revue.
1.7 Enregistreurs de bord
L'équipage a désactivé l'enregistreur de la parole dans le poste de pilotage (CVR) une fois l'appareil immobilisé à Montréal. Air Transat a retiré les enregistreurs de bord de l'appareil le jour de l'incident. Le 12 mars 2008, les enregistreurs ont été acheminés au Conseil national de recherches du Canada (CNRC) afin de télécharger les données de vol et les données audio. Le 18 mars 2008, le BST a pris possession des enregistreurs.
1.7.1 Enregistreur de la parole dans le poste de pilotage (CVR)
Le CVR était un enregistreur de marque Loral/Fairchild, modèle A100A. Le support d'enregistrement était un ruban monté en boucle sans fin. La durée nominale de l'enregistrement était de 30 minutes. La durée réelle de l'enregistrement CVR était de 33 minutes. L'enregistrement commence 15 minutes après le début du vol. En conséquence, la bande audio associée au briefing avant le décollage, au décollage et à la perte de maîtrise a été oblitérée. Le CVR répondait aux exigences de la réglementation en vigueur. La plupart des nouveaux CVR avec mémoire à semi-conducteurs offrent une capacité d'enregistrement de deux heures. Les conversations et le bruit dans le poste de pilotage avant le début de l'enregistrement CVR auraient été utiles à l'enquête.
À la suite de l'enquête du BST sur l'accident du vol 111 de Swissair survenu en 1998 en Nouvelle-Écosse (rapport du BST A98H0003), le Bureau a émis deux recommandations concernant les CVR. Une des recommandations (recommandation A99-02) était que tous les aéronefs qui doivent être équipés d'un enregistreur des données de vol (FDR) et d'un CVR soient tenus d'être équipés d'un CVR d'une capacité d'enregistrement d'au moins deux heures et ce, dès le 1er janvier 2005. Transports Canada a souscrit à cette recommandation du BST en changeant le Règlement de l'aviation canadien (RAC) en septembre 2003. Cependant, la nouvelle réglementation ne s'applique qu'aux appareils fabriqués après le 31 décembre 2003.
En 2005, le BST a enquêté sur la perte de la gouverne de direction du C-GPAT qui était équipé d'un CVR d'une durée de 30 minutes (rapport du BST A05F0047). Comme les événements reliés à la perte de la gouverne de direction sont survenus 60 minutes avant l'atterrissage, des renseignements importants enregistrés sur le CVR ont été oblitérés. Le BST a envoyé un avis de sécurité à Transports Canada en date du 3 mars 2006 pour réitérer sa préoccupation face au fait qu'en 2005 certains appareils commerciaux n'étaient toujours pas équipés de CVR ayant une capacité d'enregistrement d'au moins deux heures.
En février 2005, la Federal Aviation Administration (FAA) des États-Unis a émis un avis de projet de réglementation stipulant les exigences pour les CVR d'une capacité d'enregistrement de deux heures. La même année, Transports Canada a décidé de réviser les normes régissant les enregistreurs de bord afin de s'harmoniser avec la réglementation américaine. Depuis avril 2008, la réglementation américaine exige que les appareils fabriqués avant le 7 avril 2010 soient équipés d'un CVR ayant une capacité d'enregistrement d'au moins deux heures. La modernisation des appareils doit être complétée avant le 7 avril 2012. Transports Canada a signifié son intention de modifier la réglementation canadienne relative aux CVR. Toutefois, aucun avis de proposition de modification n'a été émis.
1.7.2 Enregistreur des données de vol (FDR)
L'avion était équipé d'un enregistreur numérique de données de vol (DFDR) de marque Honeywell, modèle SSFDR. Il prenait en compte plus de 300 paramètres et contenait plus de 53 heures de données comprenant celles du vol TSC211 ainsi que les neuf vols précédents. Le DFDR tel qu'il était configuré n'enregistrait pas les renseignements suivants qui auraient pu aider à déterminer les actions de l'équipage : l'effort au manche du pilote et du copilote, l'activation du commutateur du compensateur et du commutateur radio situés sur le volant du pilote et sur celui du copilote. À la demande du BST, Airbus a calculé l'effort au manche à partir des données enregistrées sur le FDR (voir 1.11.3).
1.7.3 Enregistrement d'images
Le poste de pilotage n'était pas équipé d'un appareil d'enregistrement des images, et cela n'est pas exigé par la réglementation. En raison de leur conception, ni le CVR ni le FDR n'ont pu aider à identifier des actions cruciales effectuées par les pilotes. Un tel enregistreur aurait été utile dans le cadre de cette enquête.
À la suite de l'enquête du BST sur l'accident du vol Swissair 111 (rapport du BST A98H0003), le Bureau a émis deux recommandations concernant les enregistreurs d'images. La première voulait que les autorités réglementaires développent des exigences harmonisées pour équiper les aéronefs de systèmes d'enregistrement d'images qui comprendraient la représentation du poste de pilotage (recommandation A03-08). La deuxième avait pour objet de protéger les enregistrements d'images afin de permettre aux organismes d'enquête de se servir des enregistrements pour des raisons de sécurité tout en empêchant qu'ils soient diffusés à d'autres fins (recommandation A03-09). Transports Canada a signifié son intention de s'harmoniser avec la FAA quand les normes et les exigences d'installation seront établies.
1.7.4 Système d'avertissement de proximité du sol amélioré (EGPWS)
L'appareil était équipé d'un EGPWS Honeywell Mark V. Le système fournit l'alerte d'un rapprochement éventuellement dangereux du relief. Pendant la descente, l'EGPWS s'est déclenché deux fois. L'appareil se trouvait à 1454 pieds agl quand la première alerte EGPWS a signalé un taux excessif de descente par rapport au relief. La deuxième alerte est survenue vers la fin de la descente à 1149 pieds agl et s'est terminée peu de temps après le début de la montée; au cours de cette deuxième alerte, l'EGPWS a signalé successivement une perte d'altitude à la suite du décollage, un taux de rapprochement excessif du relief, un taux excessif de descente par rapport au relief, un taux de rapprochement excessif du relief, et une marge de franchissement du relief dangereuse.
1.8 Renseignements sur l'aéronef
1.8.1 Généralités
L'avion, de numéro de série 597, a effectué son premier vol en septembre 1991. Le certificat d'immatriculation et le certificat de navigabilité de l'appareil étaient valides au moment de l'incident. La masse réelle au décollage du vol TSC211 était d'environ 106 733 kg, soit quelque 50 267 kg de moins que la masse maximale autorisée au décollage. Les systèmes de l'appareil ont fonctionné comme prévu.
1.8.2 Système de vol automatique (AFS)
Le système de vol automatique (AFS) est conçu pour contrôler la trajectoire de vol de l'appareil ainsi que la vitesse et la poussée des moteurs en intégrant les fonctions du PA, du directeur de vol et de l'automanette.
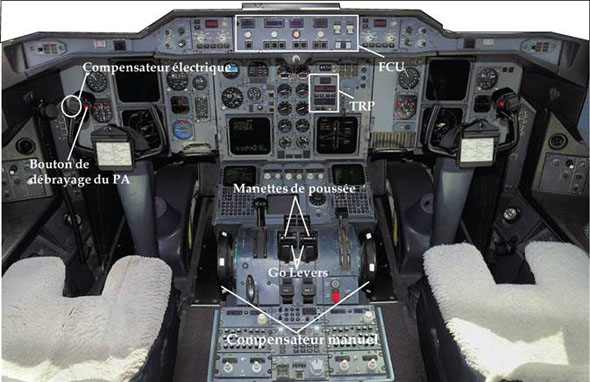
L'AFS est constitué de deux directeurs de vol, de deux PA et de deux systèmes d'automanette qui peuvent être embrayés indépendamment ou conjointement. L'AFS est contrôlé par l'entremise du FCU, du système de gestion de vol (FMS), du TRP (thrust rating panel) et des « Go Levers » (voir Photo 1).
1.8.2.1 Le pilote automatique (PA)
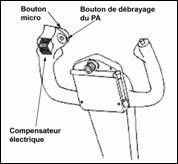
Normalement, le directeur de vol est en fonction pour la totalité du vol. Le PA est activé par le levier correspondant du FCU. Le débrayage du PA est effectué soit en plaçant le levier du FCU à la position OFF, soit en appuyant sur le bouton de débrayage instinctif qui se trouve sur le manche (voir Figure 3). Le débrayage du PA déclenche simultanément une alarme visuelle et sonoreFootnote 25 qui peut être annulée en appuyant une deuxième fois sur le bouton de débrayage instinctif du manche.
1.8.2.2 L'automanette

La poussée des moteurs est réglée par les manettes de poussée, soit manuellement par l'équipage, soit automatiquement par le système d'automanette (voir Figure 1). L'automanette peut fonctionner indépendamment du PA et du directeur de vol. L'automanette a pour but de maintenir une poussée cible ou une vitesse cible selon le mode sélectionné. Les modes en fonction sont affichés au FMA (voir Figure 2). En outre, les touches correspondant aux différentes poussées maximums sont illuminées sur le TRP.

L'automanette est activée, entre autres, en appuyant sur les « Go Levers » situés sur les manettes de pousséeFootnote 26. Dans ce cas, un servomoteur déplace mécaniquement les manettes de poussée jusqu'à ce que la poussée cible affichée au TRP soit atteinte. En vol, quand les becs de bord d'attaque sont sortis, les « Go Levers » activent le mode « Go Around » de l'AFS.
L'automanette est désactivée entre autres en appuyant sur l'un des boutons de déconnexion situés sur les manettes de poussée.
L'automanette a été activée juste avant le début de la course au décollage quand le commandant de bord a appuyé sur les boutons « Go Levers ». L'automanette a été en fonction jusqu'à ce que le copilote prenne les commandes.
L'enquête sur l'accident d'un Airbus A300Footnote 27 exploité par China Airlines à l'aéroport de Nagoya au Japon en 1994Footnote 28 a déterminé que l'activation par inadvertance des « Go Levers » avait été un facteur contributif à l'accident. L'enquête a également établi que la conception des « Go Levers » avait contribué à leur activation accidentelle; l'exploitation normale des manettes de poussée permet le déclenchement intempestif des « Go Levers ».
1.8.3 Le contrôle de l'assiette longitudinale
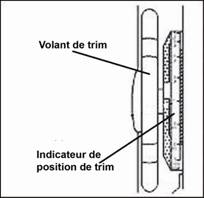
L'assiette longitudinale est contrôlée par les gouvernes de profondeur et le THS. Les gouvernes de profondeur sont commandées par le manche. La compensation en tangage de l'avion est assurée par le THS dont la plage de réglage se situe entre 3° en piqué et 14° en cabré. Un indicateur sur le volant de trim ou sur la page ECAM FLT CTL (la position STAB) affiche la position du THS. La position du THS est réglée :
- électriquement par l'utilisation des commutateurs à bascule du compensateur électrique situés sur les volants (voir Figure 3). Il compense au taux de 0,9° par seconde lorsque la vitesse est en deçà de 200 nœuds et au taux de 0,17° par seconde au-dessus de 240 nœuds. Un signal sonore « Whooler » retentit lorsqu'il est actionné plus d'une seconde, et le volant de trim tourne dans le sens approprié. Le THS s'arrête automatiquement avant d'arriver en butée. L'appareil n'est pas muni d'un dispositif autre que l'indicateur de position de trim sur le volant de trim pour indiquer à l'équipage qu'une limite du compensateur est atteinte. Sur l'A310, comme sur les avions classiques, la force que le pilote doit exercer sur le manche est l'indication naturelle et facilement détectable qui permet au pilote de prendre conscience d'une condition non compensée. Pendant la mise en palier, le compensateur électrique a fonctionné pendant 3 secondes.
- manuellement par le volant de trim situé entre les sièges des pilotes (voir Figure 4). Le volant peut surpasser tous les autres modes de réglage du THS. Sa mise en mouvement débranche les deux circuits de réglage par commande électrique; en conséquence, le compensateur électrique devient hors d'usage.
- automatiquement par le PA (Autotrim).
- automatiquement par le calculateur FAC (Flight Augmentation Computer) servant à optimiser la gestion du domaine de vol. Une des fonctions du calculateur FAC est le Speed trim (Vc). Le Vc trim compense en cabré le THS afin d'optimiser la stabilité longitudinale et la maniabilité de l'appareil. Il fonctionne au taux de 0,05° par seconde lorsque la vitesse est au-dessus de 200 nœuds et que les volets sont rentrés.
L'examen des données de vol a permis d'établir que l'équipage avait actionné à six reprises le compensateur électrique pendant les 54 secondes qu'a duré la descente. La durée de chacune des activations était d'environ une seconde.
Les calculs de masse et centrage effectués avant le décollage ont établi le centre de gravité de l'appareil à 22,46 % de la corde aérodynamique moyenne (MAC). En fonction du centre de gravité, le THS a été réglé à 1,8° afin de placer l'avion en équilibre pour la montéeFootnote 29.
1.8.3.1 Système de sensation artificielle en tangage
Deux systèmes indépendants de sensation artificielle en tangage, contrôlés par le calculateur FLC (Feel and Limitation Computer) augmentent progressivement les forces ressenties au manche en fonction de la vitesse, la position de la gouverne de profondeur, le nombre de Mach et la position du THS. Les deux systèmes sont en fonction pendant le vol; un est actif tandis que l'autre valide le fonctionnement du premier.
1.8.4 L'avertisseur de cisaillement du vent
L'appareil est équipé d'un avertisseur de cisaillement du vent. Le système fonctionne lors du décollage et d'une remise des gaz jusqu'à une hauteur radioaltimétrique de 1300 pieds. Le vol n'a généré aucun avertissement de cisaillement.
1.8.5 Communications dans le poste de pilotage
Air Transat fournit à ses pilotes des casques d'écoute Sennheiser HMEC-46. Les casques d'écoute sont conçus avec un dispositif de réduction du bruit qui atténue le niveau de bruit ambiant d'environ 15 décibels (dB) de sorte qu'il n'est pas nécessaire de mettre le volume des radios élevé. Les casques d'écoute sont équipés d'un micro-rail muni d'une protection auditive contre les niveaux sonores dépassant 110 dB.
Les membres de l'équipage communiquent entre eux au moyen d'un interphone activé par la voix. Pour les communications externes, les pilotes appuient sur un levier à bascule situé sur l'une des cornes de leur volant. Bien qu'Air Transat n'ait pas de politique explicite concernant l'utilisation des casques d'écoute dans le poste de pilotage, les deux pilotes portaient leur casque d'écoute au moment des faits.
Pendant la course au décollage, le casque d'écoute du copilote s'est débranché partiellement. Le mauvais contact entre la prise male et la prise femelle a généré un bruit strident et a momentanément détourné l'attention au moment où l'appareil atteignait la V1/Vr. Le bruit a persisté jusqu'à ce que le copilote ait rebranché son casque à 2000 pieds asl.
1.9 Renseignements sur la compagnie
Air Transat est titulaire d'un certificat d'exploitation émis par Transports Canada. La compagnie exploite 14 Airbus A310 de la série 300 et 5 Airbus A330. La compagnie comprend entre autres une division exploitation aérienne et un département de la sécurité aérienne. L'exploitation de la flotte s'effectue conformément au Système de gestion de la qualité et de la sécurité (SGQS) d'Air Transat. Le SGQS relève directement du président-directeur général de la compagnie. En bref, le SGQS fournit un processus formel et organisé dans lequel les avantages d'un système réactif intégré à un système proactif travaillent en collaboration pour améliorer continuellement la sécurité. Le système englobe tous les niveaux d'activités ainsi que la documentation qui se rapportent à la gestion de la sécurité. Un des éléments du SGQS est de rapporter tout événement opérationnel non habituel afin d'identifier les risques pour les évaluer et adopter des stratégies pour les réduire.
Selon le Règlement sur le Bureau de la sécurité des transports, l'exploitant doit faire un rapport au BST dès que possible lorsque des difficultés de pilotage surviennent en raison d'une défaillance de l'équipement de l'aéronef, d'un phénomène météorologique, d'une turbulence de sillage, de vibrations non maîtrisées ou du dépassement du domaine de vol de l'aéronef.
Immédiatement après le vol, l'équipage a signalé l'incident à la compagnie qui a aussitôt ouvert une enquête de sécurité. Le lendemain, Air Transat a informé le BST que lors de la rentrée des volets, TSC211 avait subi une perte d'altitude et avait excédé la Vmo de 20 nœuds suite à de forts cisaillements du vent. La compagnie a également informé le BST que peu de temps après que l'équipage a déclaré un « PAN PAN », les conditions de vol sont redevenues normales et la montée s'est poursuivie normalement. En tenant compte de ces renseignements, le BST a conclu que les conditions atmosphériques étaient à la source du problème et qu'une enquête sur ce cas ne permettrait pas de relever des manquements à la sécurité qui risquent de compromettre la sécurité dans les transports.
Deux jours après l'incident, l'évaluation par Air Transat des risques relatifs à l'événement basé sur la probabilité de récurrence et de son impact indiquait un risque élevé. Selon le SGQS de la compagnie, des mesures temporaires immédiates devaient être mises en œuvre dans les 48 heures. Des mesures correctives ont été mises en place dans les délais appropriés.
Suite à de l'information supplémentaire reçue plusieurs jours après l'incident, les enquêteurs du BST n'ont été en mesure d'écouter les bandes ATS que 14 jours après l'événement. Le BST a alors jugé qu'un examen supplémentaire des faits était requis afin d'élucider des éléments relevés lors de l'écoute de ces bandes. Air Transat a fourni toutes les données requises par le BST. À la suite de l'examen des données de vol, on a déterminé que l'appareil avait subi une perte de maîtrise et qu'un cisaillement du vent tel que rapporté par Air Transat n'avait pas été un facteur dans l'incident. Par conséquent, le BST a décidé qu'une enquête complète sur l'événement était nécessaire afin de déterminer les circonstances et les facteurs contributifs, et le cas échant, les manquements à la sécurité.
1.9.1 Procédures d'utilisation normalisées (SOP)
1.9.1.1 Calcul des performances au décollage sur piste contaminée
Le critère permettant de déterminer si une piste est contaminée figure dans trois documents de référence : le manuel d'exploitation (FOM)Footnote 30, le manuel SOP et le manuel d'utilisation (FCOM)Footnote 31 dans lesquels certaines divergences ont été notées quant à l'utilisation du terme « piste contaminée ».
Selon le FOM, une piste est contaminée lorsqu'elle est recouverte d'un contaminant et qualifie la contamination de mince (3 mm et moins d'équivalent d'eau) ou d'épaisse (dépassant 3 mm d'équivalent d'eau). Bien que le manuel SOP exige l'utilisation de la puissance TOGA sur une piste contaminée, ce manuel ne tient pas compte de l'épaisseur du contaminant.
Airbus offre des recommandations opérationnellesFootnote 32 pour les fins de calcul des performances au décollage sur piste contaminée. Ces données ne sont pas certifiées, mais constituent un guide dans la sélection de la puissance et des vitesses de décollage. La profondeur du contaminant et son équivalent en eau est utilisé pour déterminer si une piste est mouillée ou contaminée, et par conséquent les tableaux du FCOM à utiliser. Pour les fins de calcul des performances au décollage, une piste est considérée comme étant mouillée lorsque la profondeur du contaminant (eau, neige fondante, neige mouillée ou neige sèche) ne dépasse pas l'équivalent de 3 mm d'eau. Lorsque la profondeur du contaminant dépasse l'équivalent de 3 mm d'eau, la piste est considérée comme étant contaminée, et la puissance de décollage TOGA doit être utilisée. Le FCOM fournit aussi des équivalences en eau de divers types de contaminantFootnote 33. Cependant, ces équivalences ne sont pas publiées dans le FOM.
Au moment du décollage, 35 % de la surface de piste dégagée était recouverte de 0 à 1 pouce de congères. Selon le FCOM, les conditions de piste correspondaient aux critères de piste contaminée. Dans ce cas, la puissance TOGA et les vitesses de décollage correspondant à une piste contaminée devaient être utilisées. Bien que l'équipage ait utilisé les données de piste contaminée pour sélectionner la puissance de décollage, il a utilisé les données pour piste mouillée pour déterminer les vitesses de décollage.
Basé sur le poids de l'appareil et les conditions atmosphériques au moment du décollage, la vitesse de décision (V1), la Vr et la vitesse de sécurité au décollage (V2) auraient dû être respectivement de 117, 132 et 137 nœuds. Les vitesses choisies par l'équipage étaient 126 nœuds, 138 nœuds et 142 nœuds.
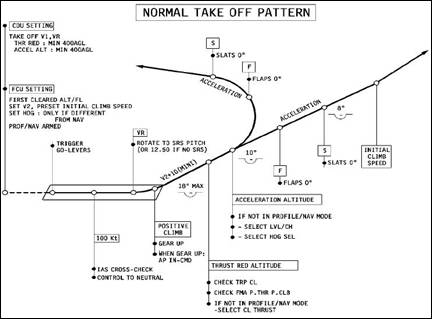
1.9.1.2 Décollage normal
Les procédures normalisées de décollage de la compagnie décrivent de façon séquentielle et détaillée des actions et des annonces que l'équipage de conduite doit effectuer au décollage (voir Tableau 1).
| Événement | Annonce/Actions | |
|---|---|---|
| PF | PM Footnote 34 | |
| Enclenchement des « Go Levers » |
« Take-Off » Annonce des FMAFootnote 35 |
« Checked » |
| Avant 80 nœuds | « Power Set » | |
| À 100 nœuds | « Checked » | « One Hundred Knots » |
| À V1 | « V1 » | |
| À Vr | « Rotate » | |
| Montée positive | « Positive Climb » | |
| « Gear Up » | Sélection en position UP de la manette du train | |
| Lorsque le PA est choisi | « Engage AP » | « AP Engaged » |
| Altitude d'accélérationFootnote 36 | Mise en accélération | |
| Vitesse FFootnote 37 | « Flaps 0 » | « Speed Checked Flaps 0 » |
| Sélection des volets à la position 15/0 | ||
| Vitesse SFootnote 38 | « Slats Retract » | « Speed Checked Slats Retracted » |
| Sélection des volets à la position 0/0 | ||
La procédure de mise en palier à basse altitude diffère de la procédure de décollage normale du fait que la poussée de montée est sélectionnée manuellement à 1500 pieds agl.
| 1500 pieds agl | « Climb Thrust » | Sélection de CLFootnote 39 sur le TRP |
Selon le plan de l'équipage, la montée aurait dû s'effectuer comme suit :
- La rotation débute à 138 nœuds, et l'appareil accélère à 152 nœuds, V2+10 nœuds.
- Le PM escamote le train après que l'avion affiche une montée positive.
- Le PA est embrayé et il maintient la vitesse V2 + 10 nœuds.
- À 400 pieds au-dessus du sol, le PF amorce un virage à droite vers un cap magnétique de 110° à l'aide du FCU.
- À 1500 pieds au-dessus du sol, le PM sélectionne CL sur le TRP, et la poussée motrice est réduite.
- À 3000 pieds asl, le PA effectue la mise en palier, l'appareil accélère à 250 nœuds, et le PM rentre les volets et les becs de bord d'attaque.
Dans les faits, certaines actions prescrites dans la procédure de décollage ont été exécutées, soit tardivement soit hors séquence ou bien n'ont pas été exécutées :
- La rotation de l'appareil s'est effectuée à 182 nœuds plutôt qu'à 138 nœuds, la Vr calculée.
- Le virage en direction du cap assigné a été amorcé à une hauteur d'environ 40 pieds agl plutôt qu'à 400 pieds comme stipulé dans le FOMFootnote 40.
- Lors de la montée initiale la vitesse de l'appareil était environ 210 nœuds soit près de 60 nœuds au-dessus de la vitesse de montée normaleFootnote 41.
- La puissance de montée (CL) n'a pas été sélectionnée sur le TRP.
- Le PA a été embrayé à 1670 pieds agl et ensuite débranché cinq secondes plus tard.
- La rentrée des volets a été effectuée à 1770 pieds agl au lieu de 3000 pieds agl.
- Le train d'atterrissage a été rentré après la rentrée des volets; normalement, le train est rentré immédiatement après le décollage quand le taux de montée est positif.
- La mise en palier s'est effectuée avec une correction en tangage prononcée, 100 pieds au-dessus de l'altitude autorisée. Au moment de la mise en palier, l'accélération verticale a atteint 0,25 g.
1.9.1.3 Mise en palier à basse altitude
Lorsqu'une mise en palier à moins de 3000 pieds agl est requise, les équipages d'Air Transat doivent exécuter la procédure de mise en palier à basse altitude (Low Altitude Level Off Procedure) de la compagnie. En résumé, l'équipage effectue un décollage normal à l'aide de la fonction SRS sans mode vertical. À 1500 pieds agl, le PF demande au PM de sélectionner CL sur le TRP. Après la mise en palier, le PF contrôle la vitesse à l'aide du FCU. Les volets et les becs de bord d'attaque sont placés dans la position appropriée à la vitesse. Pour poursuivre la montée,
la fonction Level Change (L/CH) est utilisée afin de maintenir la vitesse affichée sur le FCU jusqu'à 3000 pieds agl quand le mode profileFootnote 42 (PROF) sera sélectionné. Bien que l'équipage ait révisé la procédure avant le décollage, aucune des actions prescrites par la procédure n'ont été exécutées.
1.9.2 Procédures anormales
L'A310 est équipé d'un moniteur électronique centralisé de bord (ECAM) qui surveille les différents systèmes de l'appareil. Certaines situations anormales et urgentes sont signalées par l'ECAM. Soit l'ECAM affiche la procédure anormale et le schéma du système en cause, soit il réfère l'équipage au manuel de référence rapide (QRH). Dans le cas de cet incident, l'équipage était confronté à un comportement anormal en tangage qui pouvait être associé, soit à un blocage des gouvernes de profondeur, un emballement du compensateur horizontal, une erreur d'indication de l'anémomètre, une interférence physique causé par un des pilotes souffrant d'une incapacité, ou soit une diminution des caractéristiques aérodynamiques causées par le givrage. Aucune de ces anomalies n'est signalée par l'ECAM. Dans de telles circonstances, l'équipage doit identifier la condition anormale et exécuter intégralement la procédure appropriée du QRH.
Les procédures anormales sont exécutées selon le principe de lecture et exécution. Cependant, certaines situations urgentes requièrent la mise en œuvre immédiate d'actions que les pilotes doivent avoir mémorisées. Ces actions peuvent être effectuées, soit par le PF soit par le PM. Les actions mémorisées sont encadrées dans les listes de vérification du QRH.
Afin d'améliorer la réaction, la gestion et les communications des membres de l'équipage, Air Transat a identifié six annonces qui ont pour objet de signaler que le vol se trouve dans une situation nécessitant l'exécution d'actions mémoriséesFootnote 43, incluant l'erreur d'indication de l'anémomètre. Toutefois, une annonce relative à une situation de comportement anormal en tangage ou à un emballement du compensateur horizontal n'est pas signalée dans le manuel SOP.
1.9.2.1 Blocage de gouverne de profondeur ou forces élevées en tangage
Dans le cas d'un blocage de gouverne de profondeur ou en présence de forces élevées en tangage, l'équipage doit exécuter la procédure « Elevator Jam or High Pitch Force » (voir Figure 6). Comme la procédure est identique pour ces deux situations, les actions à exécuter sont affichées sur la même liste.

La première action stipulée dans la procédure est l'utilisation du compensateur électrique. Cette procédure n'a pas été suivie par l'équipage lors de la descente non désirée.
1.9.2.2 Comportement anormal en tangage ou emballement du compensateur horizontal
Un comportement anormal en tangage peut être le résultat d'une condition non compensée ou d'un emballement du compensateur horizontal. Les cinq premières actions de la procédure du QRH (voir Figure 7) doivent être exécutées de mémoire afin d'arrêter le mouvement en tangage.
Le PF empoigne fermement le manche et le volant de trim. Puis, il débraye le PA et s'assure que les leviers d'armement du compensateur sont débranchés. Le compensateur manuel est utilisé pour contrôler le tangage tout en vérifiant s'il s'agit d'un blocage du compensateur horizontal ou de forces élevées en tangage afin de guider l'équipage dans l'exécution de la procédure applicable.
En cas de forces élevées en tangage, l'équipage doit exécuter la procédure « High Pitch Force » (QRH 6.09) (voir Figure 6). La première action consiste à compenser avec le compensateur électrique. Toutefois, lors de l'exécution de la procédure « Abnormal Pitch Behavior or Pitch Trim Runaway », l'utilisation préalable du compensateur manuel désarme les leviers d'armement du compensateur électrique, le rendant inopérant. Cette procédure n'a pas été utilisée lors du problème de maîtrise en tangage.
1.9.2.3 Erreur d'indication de l'anémomètre
Une erreur d'anémomètre est causée par le blocage partiel ou complet des tubes de Pitot ou des prises statiques. La procédure en cas d'indication erronée de l'anémomètre est affichée sur les volants de l'appareil. La procédure a pour objet de fournir aux pilotes les informations et directives suivantes :

- les indices permettant de reconnaître la présence d'une erreur d'anémomètre;
- les éléments mémorisés pour le contrôle à court terme de l'appareil;
- les éléments « lecture et exécution » et « données tangage/N1 », pour maintenir le contrôle de l'appareil jusqu'à l'atterrissage.
Selon le FCOMFootnote 44 de l'A310 d'Air Transat, une des observations suivantes peut être interprétée comme étant une indication de défaut de fonctionnement de l'anémomètre :
- une fluctuation anormale de la vitesse indiquée (IAS);
- une différence entre l'IAS du pilote et du copilote;
- une divergence entre l'anémomètre et la vitesse cible;
- un comportement anormal de l'automanette ou du PA/directeur de vol en mode SPDFootnote 45;
- une augmentation de l'IAS dans une assiette de cabré prononcée;
- une diminution de l'IAS dans une assiette de piqué prononcée;
- une vitesse constante en montée ou en descente;
- une vitesse de montée positive ou négative en palier;
- une activation imprévue de l'avertisseur de décrochage et du vibreur de manche;
- une activation simultanée de l'avertisseur de survitesse et de l'avertisseur de décrochage/vibreur de manche.
1.9.2.4 Pilote souffrant d'une incapacité
Selon le FOM de la compagnieFootnote 46, si au cours d'un vol, un pilote ne répond pas après un deuxième appel consécutif [annonce consécutive] de la part d'un autre membre d'équipage, on doit le considérer comme étant incapable de remplir ses fonctions. La première responsabilité de l'autre pilote est de veiller à la sécurité du vol et de maîtriser l'appareil. Puisque le pilote atteint d'une incapacité risque de gêner le déplacement des commandes, l'autre pilote doit prendre toutes les mesures nécessaires pour garder la maîtrise de l'appareil.
La formation en simulateur consiste à reproduire l'incapacité soudaine et grave d'un pilote au décollage. Une incapacité légère et incomplèteFootnote 47 n'est pas reproduite dans le simulateur.
1.9.3 Formation
Air Transat dispose de sa propre structure de formation agréée pour la délivrance des qualifications de type. Le programme d'entraînement est approuvé par Transports Canada dont les représentants participent à certaines séances sur simulateur. Lors des sessions sur simulateur, les anomalies de commandes de vol, les cas où un pilote souffre d'une incapacité et les situations de fonctionnement incertain d'anémomètre sont abordés.
Air Transat, comme plusieurs transporteurs, utilise une matrice de formation fondée sur celle d'Airbus.
Lors de la formation initiale A310, le blocage des gouvernes de profondeur est reproduit une fois en simulateur complet lors de la quatrième session (FFS4). Selon la matrice de formation, l'emballement du compensateur horizontal est pratiqué une fois lors de la cinquième session en simulateur (FFS5). Dans le cadre de la mise à niveau de copilote à commandant de bord, l'emballement du compensateur horizontal est également revu lors de la deuxième session (FFS2) en simulateur complet. Comme le simulateur utilisé par Air Transat ne peut pas reproduire un emballement du compensateur horizontal, la formation pratique est remplacée par un briefing de l'instructeur.
Ni la procédure en cas de forces élevées au manche ni le comportement anormal en tangage n'est inscrit sur la matrice de formation initiale, de mise à niveau ou récurrente.
Comme instructeur dans le simulateur, le copilote avait souvent observé des équipages en séance d'entraînement perdre le contrôle d'un aéronef en raison d'une surutilisation du compensateur électrique lors de simulations de blocage de gouverne de profondeur. Le copilote croyait à tort que l'usage du compensateur dans des situations anormales avait été un facteur dans certains accidents d'A310.
1.10 Essais et recherches
1.10.1 Simulateur
Les pilotes d'A310 de la série 300 de la compagnie s'entraînent sur un simulateur complet de vol Reflectone A310-221 exploité par Canadian Aviation Electronics (CAE) à Montréal. Le simulateur est certifié par Transports Canada depuis décembre 2003 à un niveau de certification CFootnote 48. CAE utilise un guide d'essais de qualification (GEQ) pour certifier que les performances et les qualités de pilotabilité du simulateur se conforment, dans les limites prescrites, à celles de l'aéronef, et que toutes les exigences réglementaires sont satisfaites. Selon le dossier d'entretien de CAE, le simulateur respectait les critères de validation au moment de la formation de l'équipage.
Comme Air Transat exploite uniquement des A310 de la série 300 et que le simulateur présente le fonctionnement d'un A310 de la série 200, la formation du personnel naviguant comprend un cours sur les différences entre les deux plateformes. Les différences relatives à l'aménagement du poste de pilotage, à la pressurisation, aux moteurs, au système électrique, au QRH et aux performances sont traitées lors de la formation. Deux séances en simulateur ont été menées en appui avec l'enquête sur l'incident. Le BST a effectué une série de vols sur le simulateur Reflectone A310-221 utilisé par Air Transat. Le simulateur CAE utilisé pour les essais est un simulateur d'entraînement pour équipage de conduite, et non un simulateur technique.
1.10.1.1 Première séance en simulateur
La première séance avait pour objet d'obtenir une idée générale du comportement de l'avion et de la technique de pilotage utilisée en fonction des SOP d'Air Transat. Les essais en simulateur ont permis aux enquêteurs d'observer divers modes de fonctionnement automatiques et manuels basés sur le profil de vol de TSC211. Divers profils ont été exécutés. Ces vols ont permis d'évaluer les performances de l'avion à la suite de l'application des procédures pertinentes à une difficulté de maîtrise. Le simulateur a été réglé dans des configurations similaires à celles de TSC211 à divers moments au cours des 10 premières minutes du vol.
Étant donné que les moteurs de l'A310-221 produisent moins de poussée que ceux de l'A310-308, les performances de TSC211 au décollage et en montée n'ont pu être reproduites. Il n'a donc pas été possible d'établir une corrélation entre le comportement de différents systèmes, comme le PA et les moteurs, du simulateur et du C-GPAT. Par ailleurs, certains pilotes d'Air Transat considèrent que l'appareil réagit différemment que le simulateur lors de l'activation du PA, des volets et des becs de bord d'attaque.
Les observations saillantes effectuées par le BST lors de cette séance en simulateur dans une configuration similaire à celle de l'avion lors de la perte de maîtrise sont les suivantes :
- l'utilisation du compensateur électrique a donné lieu à une montée positive;
- l'utilisation du compensateur manuel a donné lieu à une montée positive;
- l'utilisation de la puissance TOGA a donné lieu à une montée positive;
- l'utilisation de forces au manche seulement a donné lieu à une montée positive.
L'emballement du compensateur horizontal ne peut être simulé sur le simulateur A310-221 utilisé pour la formation des pilotes.
1.10.1.2 Deuxième séance en simulateur
La deuxième séance avait pour objet d'évaluer les efforts sur le manche du simulateur afin de comparer les données obtenues avec celles calculées par Airbus pour le C-GPATFootnote 49. Le simulateur a été configuré pour reproduire les conditions du vol TSC211 au moment des faits.
Les essais ont permis de constater que la position du volant de trim indiquée était d'environ 1,1° de moins que la position réelle du THS et que la butée en piqué du compensateur était de 2,3° au lieu de 3,0°. Il a été constaté que les efforts sur le manche du simulateur correspondaient à ceux calculés par Airbus pour l'appareil jusqu'à 250 nœuds. Au-dessus de 250 nœuds, les efforts sur le manche du simulateur étaient significativement moins importants que ceux de l'appareil lorsque le compensateur était en position neutre ou en piqué.
1.10.1.3 Transfert de l'apprentissage
Le transfert de l'apprentissage est défini comme l'incidence des habiletés et des connaissances acquises pendant la formation sur la performance opérationnelle. Dans certains cas, cette incidence n'est pas toujours positive. Il est possible que le transfert soit neutre (aucune incidence) ou négatif. Un transfert négatif constitue un risque puisque la formation peut conduire à la prise de décisions ou d'actions opérationnelles erronées ou inappropriées.
Dans le cas de la formation en simulateur, il y a une tendance à associer la qualité du transfert de l'apprentissage à la fidélité du simulateur. En général, on associe un transfert positif à une fidélité élevée. La fidélité des simulateurs peut être qualifiée selon trois critères : la fidélité physique, la fidélité contextuelle et la fidélité psychologique (Kinkade and Wheaton, 1972)Footnote 50. En général, les fidélités contextuelles et psychologiques sont les plus difficiles à recréer. Bien que les sessions sur simulateur se déroulent de façon formelle, il est difficile de recréer des situations d'urgence et inhabituelles qui comportent tous les éléments contextuels et psychologiques telle la dynamique entre les membres de l'équipage. La fidélité n'est pas le seul élément qui dicte la qualité du transfert de l'apprentissage. Selon les objectifs visés par la formation, une fidélité élevée n'est pas forcément requise, notamment pour la formation à l'utilisation des procédures. Une haute fidélité physique est importante pour la formation relative à la conscience de la situation (perception, analyse et compréhension de l'information). Cette importance est notamment justifiée par le fait que les pilotes travaillent dans un environnement comprenant des listes de contrôles et de vérifications utilisées pour reconnaître un problème ou une anomalie. Une représentation physique fidèle de ces situations favorise la mémorisation des procédures.
Dans le simulateur, le copilote était en mesure de surmonter l'effort au manche avec le THS en butée, sans utiliser le compensateur.
1.11 Renseignements supplémentaires
1.11.1 Perte de maîtrise
Au cours des dernières années, il y a eu plusieurs accidents et incidents au cours desquels des membres d'équipage de conduite ont eu à composer avec une assiette inhabituelle de l'aéronef. Les pilotes de ligne ont rarement à faire face à des angles d'inclinaison latérale ou à des angles d'inclinaison longitudinale très prononcés associés à ce genre de perte de maîtrise d'un aéronef. Il existe de nombreuses explications à ces pertes de maîtrise y compris des facteurs liés à l'environnement, à l'équipement et à l'équipage, dont la grande partie est attribuable à des facteurs environnementaux qui ne peuvent pas toujours être évités ou contrôlés.
Malgré quelques variations selon le modèle de l'appareil, il y a perte de maîtrise lorsqu'une ou plusieurs des situations suivantes surviennent:
- Angle de cabré au-delà de 25°
- Angle de piqué au-delà de 10°
- Angle de roulis au-delà de 45°
- Un angle à l'intérieur de ces paramètres, mais une vitesse inappropriée pour les conditions de vol.
Dans le cas présent, même si les angles de piqué, de cabré ou de roulis étaient à l'intérieur des paramètres, la vitesse de l'appareil était inappropriée; par conséquent, cet événement est considéré comme une perte de maîtrise.
1.11.2 Prise de décision dans un environnement dynamique
Les pilotes prennent des décisions dans des conditions changeantes ou l'information disponible est le reflet de l'environnement dynamique dans lequel évolue l'appareil. Les études ont établi que le processus décisionnel est une boucle composée de trois étapes séquentielles : conscience de la situation, prise de décision et observation de la performance résultante de cette décision. L'équipage doit être conscient de la situation réelle pour prendre une décision appropriée. Dans un cockpit, les contre-vérifications et la communication efficace entre les membres de l'équipage de conduite mitigent les erreurs de perception.
La conscience de la situation passe par la perception des éléments de la situation réelle, la compréhension de cette situation, et la projection dans le temps de cette situation. Entre autres, la formation, les connaissances, l'expérience et les préconceptions du pilote sont des facteurs individuels qui influencent sa compréhension de la situation.
La charge de travail mental est un élément qui agit sur le processus de prises de décision. Elle peut se définir comme étant la quantité d'information devant être analysée à un moment donné. La charge de travail mental augmente en fonction de la quantité et de la complexité de l'information reçue. Lors de situations anormales ou urgentes, les pilotes doivent analyser de l'information complexe et possiblement conflictuelle afin d'avoir une compréhension exacte de la situation, essentielle à la mise en œuvre d'un plan approprié. Une surcharge d'information peut contribuer à une conscience erronée de la situation.
Lorsqu'ils subissent une surcharge d'information, les pilotes se concentrent fréquemment sur une partie de l'information au détriment de l'ensemble de la situation. Cette canalisation de l'information est bénéfique seulement si le pilote a choisi l'information pertinente.
1.11.3 L'effort au manche lors du vol
Comme l'appareil est équipé de commandes de vol hydromécaniques, les forces aérodynamiques des gouvernes de l'aéronef peuvent être ressenties par l'équipage. Afin d'éviter le risque de surcharger l'appareil, Airbus utilise un système qui génère une force artificielle sur les commandes de vol. Airbus a calculé l'effort exercé sur le manche par l'équipage lors de l'incident (voir Figure 9). L'effort ressenti au manche est artificiel; il est le résultat de la commande du calculateur FLC qui dépend de la vitesse, du nombre de Mach, et de la position du THS. L'effort au manche est la force nette exprimée en décanewtons (daN)Footnote 51 à un moment donné, calculé en fonction de la vitesse de l'avion, du nombre de Mach et de la position du THS et de la déflexion de la gouverne de profondeur. La précision des données est de l'ordre de +/−15 % jusqu'à +/−20 % pour les braquages les plus importants.
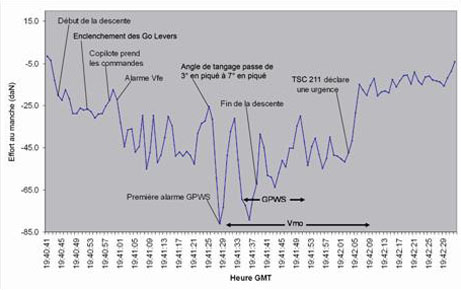
Pendant la phase critique du vol, l'effort au manche augmente distinctement quand l'appareil débute sa descente et que le THS atteint la limite de butée en piqué du compensateur électrique. L'effort au manche se maintient à environ −30 daN jusqu'au moment où le copilote prend les commandes. On note alors un relâchement momentané du manche. Par la suite, l'effort au manche oscille entre −30 daN et −55 daN jusqu'à ce que l'angle de piqué de l'appareil passe à 7°en piqué. Dès lors, l'effort au manche augmente de façon significative et fluctue entre −30 daN et −80 daN. Une baisse importante de l'effort au manche survient quelques instants après le début de la montée.
La limite maximum de l'effort au manche dépend de plusieurs facteurs : les forces de contraction musculaires individuelles; les avantages mécaniques selon les angles de levier avec le corps; la position du corps; la prédominance de la main droite ou de la main gauche; l'état émotionnel; le type de commande (manche conventionnel, manche à balais); la position du corps et le siège.
Selon des études effectuées par la FAA et le Department of Defence des États-Unis, environ 5 % de la population peuvent exercer une force de traction de −80 daN. On a également évalué qu'un tel effort ne peut être exercé que pendant une à deux secondes.
1.11.4 Illusion somatogravique
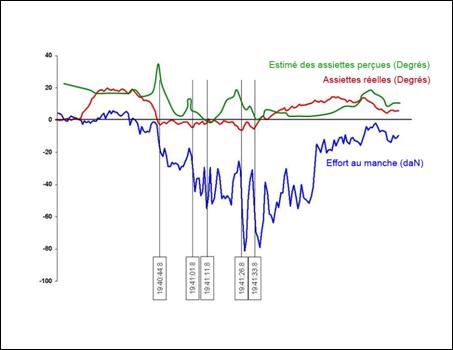
L'incident est survenu dans des conditions météorologiques de vol aux instruments (IMC) favorables à l'illusion somatogravique. L'illusion somatogravique est un phénomène qui se produit par mauvaise visibilité ou dans l'obscurité, en l'absence de repères visuels. Les pilotes chevronnés et titulaires de la qualification de vol aux instruments ne sont pas à l'abri de ce type d'illusion qui est une forme sournoise et dangereuse de désorientation. Cette illusion se produit parce que le corps humain fait appel aux organes sensoriels de l'oreille interne pour assurer son équilibre et, en l'absence de repère visuel, les signaux transmis par ces organes peuvent produire une désorientation très grave. Lorsque l'aéronef accélère, les organes sensoriels de l'oreille interne du pilote ont tendance à envoyer un signal au cerveau du pilote qui est interprété comme une inclinaison vers l'arrière plutôt que comme une accélération vers l'avant. Si le pilote relève le nez de l'avion dans le même temps, le pilote a la très forte impression qu'il est en montée. À cause de cette illusion de fausse montée, le pilote a tendance à abaisser le nez de l'avion pour descendre. L'aéronef accélère alors, ce qui risque de renforcer l'illusion. Les pilotes ne peuvent se fier à leurs sens et doivent confirmer la position en cabré de l'appareil en utilisant l'indicateur d'assiette de l'écran principal de vol (PFD).
Les données de vol nous ont permis d'estimerFootnote 52 l'assiette perçue par l'équipage (voir Figure 10). On constate :
- que vers 14 h 40 min 44, à la fin de la montée, l'assiette perçue atteint plus de 30° tandis que l'assiette réelle est d'environ −3°;
- qu'entre 14 h 40 min 44 et 14 h 41 min 11, l'assiette perçue est en cabré et est supérieure à l'assiette réelle;
- qu'entre 14 h 41 min 11 et 14 h 41 min 27, l'assiette perçue augmente à nouveau jusqu'à +18°;
- une diminution significative des efforts au manche à 14 h 41 min 1, 14 h 41 min 26 et 14 h 41 min 33, alors que l'assiette en tangage était respectivement de −4,2°, −6,3° et 5,6°.
2.0 Analyse
2.1 Introduction
L'appareil fonctionnait normalement pendant le vol et lors de l'incident. L'équipage était qualifié conformément à la réglementation en vigueur pour effectuer le vol, et chacun des membres de l'équipage avait reçu la formation exigée par Transports Canada. En tant que PVA de type A, le copilote était familier avec les procédures d'urgence de l'A310. En raison de son expérience antérieure comme copilote et sa récente formation de commandant de bord, le commandant de bord était familier avec les systèmes de l'appareil .
L'incident est attribuable à une combinaison de facteurs d'ordre opérationnel qui se sont réunis de sorte que les normes de sécurité n'ont pas été maintenues. La perte de maîtrise en tangage est survenue à la suite d'un décollage atypique, d'une montée où les performances de l'appareil étaient inhabituelles, d'annonces normalisées manquées et hors séquence, d'ajustements incorrects des commandes de vol, de l'enclenchement accidentel des « Go Levers », d'une conscience inexacte de la situation et de l'inapplication de la procédure recommandée en cas de difficulté de maîtrise en tangage.
En conséquence, l'analyse portera sur les décisions et les actions de l'équipage, les systèmes de l'avion, la formation de l'équipage, et les conditions qui ont mené à la perte de maîtrise en tangage momentanée de l'aéronef.
2.2 Signalement de l'événement par Air Transat
Le lendemain de l'incident, le département de la sécurité aérienne d'Air Transat a informé le BST que TSC211 avait subi une perte d'altitude importante et une survitesse suite à un phénomène de cisaillement du vent. Puisque la cause réelle de la perte de maîtrise de l'appareil était inconnue, la compagnie a présumé qu'un phénomène météorologique avait causé la descente non sollicitée et le dépassement de la Vmo.
Une analyse plus approfondie des faits et des circonstances ne permettait pas de retenir l'hypothèse du cisaillement du vent comme un facteur dans l'événement. Les prévisions météorologiques ne prévoyaient aucun cisaillement du vent et il n'y a eu aucun rapport de cisaillement du vent, que ce soit avant ou après l'incident. De plus, aucun paramètre de vol de TSC211 ne suggère que l'appareil a subi les effets d'un cisaillement du vent.
Dans le cadre d'un SGQS, l'analyse des données de vol fait partie intégrale de l'enquête interne de la compagnie nécessaire à l'identification des risques à la sécurité des opérations. Deux jours après l'incident, Air Transat avait rejeté l'hypothèse du cisaillement du vent. La conséquence potentiellement grave d'une perte de maîtrise aurait dû susciter une mise à jour du rapport d'événement au BST. Malgré ce fait, pour une raison indéterminée, la compagnie n'a pas avisé le BST que le rapport soumis au BST était inexact. Dans le cas présent, le système de gestion de la sécurité n'a pas signalé les nouveaux détails connus de l'incident. En conséquence, le début de l'enquête du BST a été retardé.
Le début tardif de l'enquête a retardé la prise des témoignages, ce qui a contribué à la perte de renseignements qui auraient pu aider à déterminer les actions de l'équipage et les circonstances entourant l'incident.
2.3 Questions relatives aux services de la circulation aérienne
Le manque relatif de familiarité du contrôleur avec le message d'urgence PAN PAN ainsi que le message radio inattendu de l'équipage du vol TSC211Footnote 53 alors que l'équipage avait déjà reçu instruction de contacter le terminal de Québec peuvent avoir contribué à l'absence de réaction positive du contrôleur. Dans une situation de détresse ou d'urgence, le contrôleur ne peut disposer que d'une seule occasion pour obtenir l'information de l'équipage. En conséquence, il est primordial que les contrôleurs reconnaissent immédiatement une situation d'urgence afin de réagir correctement. Comme ces situations sont peu fréquentes et qu'elles ne sont pas revues régulièrement, il existe un risque accru que la situation soit mal gérée. Les actions du contrôleur, toutefois, n'ont pas contribué directement au déclenchement ou au résultat de l'incident.
2.4 Préparation avant le décollage
2.4.1 Décision de décoller avec une RVR de 1800 pieds
L'appareil a décollé avec une RVR de 1800 pieds avec un commandant de bord qui totalisait moins de 100 heures de vol sur A310 à titre de commandant de bord. Compte tenu de son expérience, le commandant de bord ne pouvait décoller qu'avec une RVR de 2600 pieds ou plus. En conséquence, le décollage s'est effectué dans des conditions de visibilité inférieure à la limite prescrite par la réglementation en vigueur.
Il apparaît que l'équipage a pris la décision de décoller en fonction des compétences du pilote vérificateur qui agissait à titre de copilote. Comme le copilote possédait les compétences voulues pour décoller avec une RVR de 600 pieds, l'équipage a cru à tort que les conditions de décollage par visibilité réduite étaient conformes aux exigences en vigueur. Cependant, selon le FOM, pour décoller avec une RVR de 1800 pieds, le copilote devait assumer les responsabilités de commandant de bord, exécuter lui-même le décollage, et un aéroport de dégagement devait être mentionné dans le plan de vol.
Le commandant de bord possédait plus de dix années d'expérience chez Air Transat comme copilote. Toutefois, comme les décollages par visibilité réduite ne peuvent être effectués que par le commandant de bord, c'était la première fois que le PF exécutait un décollage avec une RVR inférieure à 2600 pieds. Bien qu'il ait effectué des décollages dans des conditions de visibilité réduite en simulateur, les exigences de conformité d'un simulateur de niveau C ne permettent pas de reproduire les conditions réelles lors de la course au décollage. Il est possible que le peu d'expérience de commandant de bord dans ces conditions ait contribué au décollage atypique.
À la lumière de ces faits, on peut penser que la formation des pilotes sur les décollages par visibilité réduite est lacunaire puisque les deux pilotes, dont un est instructeur et pilote vérificateur, ont mal interprété les normes.
2.4.2 Calcul des performances au décollage sur piste contaminée
Lorsqu'une piste est recouverte d'un contaminant, il est primordial que l'équipage puisse facilement déterminer les vitesses et la puissance à utiliser au décollage. Bien que l'équipage ait reconnu la nécessité d'utiliser la puissance TOGA pour le décollage, puisque la piste était contaminée, les vitesses pour un décollage sur piste mouillée ont été utilisées. Le résultat était que la V1 utilisée était 9 nœuds plus élevé qu'elle aurait du être dans les conditions existantes. Le choix d'une vitesse inappropriée peut avoir des conséquences néfastes sur le déroulement du vol dans le cas d'une situation d'urgence puisqu'une V1 plus élevée que la V1 recommandée augmente le risque de sortie en bout de piste lors de décollage interrompu. Toutefois, la sélection des vitesses pour piste mouillée au lieu de celles pour piste contaminée n'a pas été un facteur dans l'incident.
L'utilisation des vitesses inappropriées a pu être influencée par la difficulté accrue à calculer les performances de décollage sur une piste contaminée combinée à une confusion reliée aux différentes définitions de piste contaminée qui sont présentées aux équipages. Par conséquent, bien que la définition de conditions de piste contaminée du FOM et celle du manuel SOP de la compagnie soient véridiques au sens technique, ces définitions diffèrent des définitions utilisées par Airbus dans ses recommandations pour les opérations sur piste mouillée ou contaminée.
2.4.3 Modification de l'autorisation de départ
Bien que l'équipage ait été avisé que l'autorisation de départ initiale avait été modifiée pendant le roulage vers la piste, les changements ont été effectués en conformité avec les normes établies. Par ailleurs, dans des circonstances autres, un changement d'autorisation de dernière minute peut augmenter la charge de travail de l'équipage et a, du fait même, le potentiel de mener à des erreurs. Toutefois, comme aucun autre appareil ne suivait TSC211, l'équipage a pu bénéficier de suffisamment de temps pour la reconfiguration des systèmes de bord associée au nouveau profil de vol.
La nouvelle autorisation diminuait l'altitude de mise en palier à 3000 pieds et modifiait le cap de la montée. En conséquence, l'équipage a suivi la procédure de mise en palier à basse altitude et, conformément avec le FOM, la montée s'est effectuée en mode SRS plutôt qu'en mode PROF.
Pour les motifs suivants, la charge de travail de l'équipage a été plus grande lors de la montée qu'elle ne l'aurait été si l'aéronef avait suivi le SID initialement prévu :
- En mode SRS, la sélection de Climb Thrust sur le TRP est effectuée manuellement par le PM à la suite d'une annonce du PF. En mode PROF, la gestion de la puissance s'effectue automatiquement. À1500 pieds, la poussée est réduite automatiquement à la poussée CLB Thrust. Dans le cas qui nous occupe, l'annonce CLB Thrust n'a pas été faite, et le PM n'a pas réduit la puissance à la poussée de montée.
- Le PF a dû simultanément exécuter un changement de cap de 44°, gérer la vitesse trop élevée lors de la montée, mettre en action les éléments stipulés dans la procédure normalisée de décollage et arrêter la montée à 3000 pieds.
- En raison d'une mise en palier effectuée 1000 pieds plus bas que celle spécifiée sur le SID et d'un taux de montée inhabituellement élevé, l'équipage a disposé de moins de temps pour compléter les tâches requises. Dans les faits, des actions n'ont pas été exécutéesFootnote 54, ou ont été effectuées hors séquence, ce qui a causé de la confusion dans le poste de pilotage.
Dans des conditions normales, les équipages de conduite exécutent sans difficulté des virages en montée concurremment avec une mise en palier à basse altitude. Par contre, dans des conditions inhabituelles telles que celles rencontrées par TSC211, les actions additionnelles requises pour suivre ce type de profil de montée peuvent surcharger l'équipage et donner lieu à des erreurs.
2.4.4 Planification du décollage et de la montée
Le briefing avant le décollage a été routinier. Au seuil de piste, l'équipage a revu la procédure de mise en palier à basse altitude et le mode SRS a été sélectionné. Donc, les pilotes connaissaient bien la séquence des annonces et des actions à exécuter lors de la montée et de la mise en palier. Or, les circonstances qui ont influé sur le décollage et les performances inhabituelles de l'appareil ont surpris l'équipage, et un manque de coordination dans le poste de pilotage s'en est suivi. En conséquence, la séquence des actions et des annonces lors de montée n'a pas été respectée.
Un briefing qui aurait globalement pris en compte la faible masse de l'appareil, la puissance TOGA au décollage et le fort vent aurait permis aux pilotes d'anticiper les performances de l'appareil ainsi que ses conséquences sur la montée.
2.5 La course au décollage, la montée et la mise en palier
2.5.1 La course au décollage
L'accélération rapide lors de la course au décollage a résulté de la puissance TOGA, de la faible masse de l'appareil et d'un vent de face de 24 à 32 nœuds. Dix-sept secondes après l'activation des « Go Levers », l'appareil a atteint la Vr calculée, et le nez de l'appareil s'est cabré momentanément pendant 2 secondes. Le réglage du THS avant le décollage a modifié la stabilité statique de l'avion et a favorisé le cabrage naturel de l'appareil à la Vr. Toutefois, le PF n'a pas reconnu que la tendance à cabrer signalait l'atteinte de la Vr, et il n'a pas vérifié la vitesse affichée sur le PFD. Le PF, entièrement concentré sur les repères extérieurs, a attendu l'annonce Vr pour effectuer la rotation. En conséquence, la rotation s'est effectuée aux sollicitations pressantes du copilote, 44 nœuds au-dessus de la Vr calculée. Les facteurs suivants ont contribué à la rotation tardive :
- Le casque d'écoute du copilote s'est débranché lors de la course au décollage et l'annonce « Rotate » n'a pas été faite à la Vr.
- Le commandant de bord était concentré sur les références extérieures parce que la neige et la poudrerie basse réduisaient la visibilité. En conséquence, il n'a pas vérifié la vitesse sur le PFD.
- C'était le premier décollage du commandant de bord sur A310 dans des conditions de visibilité réduite.
- L'appareil était léger et a atteint la Vr plus rapidement qu'anticipé par le commandant de bord.
2.5.2 La montée
Du fait que la rotation a été tardive, l'appareil a pris son envol 33 nœuds au-dessus de la vitesse de montée normale soit V2 +10. En raison de la rotation tardive et de l'accélération rapide de l'avion, la vitesse de l'avion a atteint la vitesse maximum (Vmax) volets position 15/15 cinq secondes plus tard. Le PF a alors priorisé la gestion de la vitesse au détriment des autres éléments de la procédure de décollage. Dès lors, la séquence des actions et des annonces normalisées a été bouleversée, ce qui a provoqué un manque de coordination de l'équipage. Le PF a placé l'appareil à l'angle de cabré maximum recommandé dans le FOM afin de contrôler la vitesse de l'avion. L'angle de cabrage prononcé et la vitesse élevée ont entraîné un taux de montée de 6300 pi/min. Pour éviter d'augmenter l'angle de tangage, le PF a demandé la rentrée des volets à 1770 pieds asl plutôt qu'à 3000 pieds. Du fait de la charge de travail élevée, ni le PF ni le PM n'ont sélectionné CL sur le TRP. Par conséquent, la poussée motrice n'a pas été réduite, et l'appareil a maintenu sa vitesse ascensionnelle élevée.
L'enquête n'a pas permis de déterminer pourquoi le PF a effectué le virage avant 400 pieds. Il est possible qu'on ait affiché le cap assigné au FCUFootnote 55 avant le décollage et que le PF ait suivi les barres directrices du directeur de vol dès que l'avion a quitté le sol. Quoi qu'il en soit, la recherche du cap assigné dès le décollage et la vitesse élevée de l'avion lors de la montée, combinée avec la procédure de mise en palier à basse altitude, ont complexifié la tâche de l'équipage.
2.5.3 L'utilisation du pilote automatique
Air Transat préconise l'utilisation du PA sans toutefois stipuler les circonstances où sa mise en fonction est recommandée après le décollage. Par conséquent, le commandant de bord a la liberté de décider d'embrayer ou de ne pas embrayer le PA.
Selon le FOM (voir Figure 5), le PF aurait dû demander au PM d'embrayer le PA dans les instants qui ont suivi le décollage. Cependant, le déroulement inhabituel de la course au décollage et de la séquence de montée a retardé l'embrayage du PA. L'embrayage du PA immédiatement après le décollage aurait allégé la charge de travail de l'équipage en prenant en charge la direction de l'appareil, la tenue de cap, la gestion de la vitesse, la compensation automatique du THS et la capture de l'altitude assignée.
L'embrayage du PA vers 1700 pieds suggère que l'équipage désirait alléger sa charge de travail. Néanmoins, 5 secondes plus tard, le PF a débrayé le PA sans toutefois annuler l'alarme de débrayage qui a retenti pendant l'incident. On peut penser que, bien que l'annulation de l'alarme de débrayage soit une tâche à priori simpleFootnote 56, les conditions de vol généraient une charge de travail telle que les pilotes ont jugé prioritaire l'exécution d'autres actions. L'alarme a été un facteur de stress parmi d'autres qui a pu influer négativement sur la performance de l'équipage. La décision du PF de débrayer le PA s'appuyait en partie sur des expériences antérieures et la conviction que l'appareil dépasserait l'altitude assignée.
En toute hypothèse, rien n'indique que même après sa mise en fonction tardive, le PA n'aurait pas exécuté la mise en palier correctement. Son fonctionnement aurait permis d'éviter que l'avion se trouve dans une condition non compensée, situation qui est survenue lors de la mise en palier en vol manuel.
2.5.4 La mise en palier
L'amorce de la mise en palier a débuté à 2400 pieds alors que l'appareil avait un taux de montée d'environ 5400 pi/min. Comme l'altitude assignée approchait rapidement, le commandant de bord a dû pousser fermement sur le mancheFootnote 57 pour arrêter la montée à 3000 pieds. En conséquence, il a utilisé le compensateur électrique pendant 3 secondes pour alléger l'effort au manche. Le THS a passé 0,3° en piqué à sa butée électrique de 2,7° en piqué. Sans s'en rendre compte, le commandant de bord a placé l'appareil dans une condition non compensée en piqué.
Comme l'appareil n'est pas équipé d'un système d'avertissement pour indiquer qu'une limite du compensateur est atteinte, l'équipage doit regarder l'indicateur de position de trim sur le volant de trim pour déterminer la position du THS ou consulter la page ECAM FLT CTL. Étant concentrés sur les instruments de bord, ni le commandant de bord ni le copilote n'ont réalisé que l'avion était dans une condition non compensée et que la limite en piqué avait été atteinte. Bien que le « Whooler » ait retenti pendant environ deux secondes lors de l'activation du compensateur, l'alerte sonore était de trop courte durée pour alerter l'équipage.
Bien que le commandant de bord ait tiré sur le manche avec une force constante dès le début de la descente, il n'a pas réalisé que l'avion se trouvait dans une condition non compensée. L'effort requis pour déplacer le manche est un indice tactile significatif permettant de déceler une telle condition. Normalement, les pilotes utilisent intuitivement le compensateur électrique pour annuler l'effort au manche. Il est possible que l'accumulation des tâches reliées au vol manuel, au maintien du cap, à la recherche de l'altitude et à la gestion de la vitesse, et que le retentissement de l'alarme de débrayage du PA, aient surchargé le PF et aient contribué à son inaction au compensateur.
2.6 La descente
2.6.1 Début de la descente
Dès le début de la descente, le commandant de bord tire sur le manche et maintient la gouverne de profondeur à environ 7° en cabré. Il actionne quatre fois le compensateur électrique lors des 14 secondes suivantesFootnote 58. Le THS passe de 2,7° en piqué à 1,8° en piqué. Toutefois, l'assiette de l'avion reste sous l'horizon et les forces au manche oscillent autour de 25 daN. En conséquence, on peut conclure que les actions de l'équipage au compensateur et au manche étaient insuffisantes pour obtenir une assiette de cabré et arrêter la descente.
2.6.2 Activation accidentelle des « Go Levers »
À environ 2850 pieds en descente, le PF ramène les manettes de poussée pour éviter le dépassement de la Vfe en position 15/0. C'est à ce moment qu'il a activé accidentellement les « Go Levers » sans s'en rendre compte. Étant donné que les becs de bord d'attaque étaient partiellement sortis, le mode « Go Around » s'est activé. Par conséquent, quand le PF a relâché les manettes de poussée, elles se sont avancées automatiquement à la puissance maximale, et l'appareil a accéléré rapidement vers la Vfe en position 15/0.
L'architecture des « Go Levers » permet de les activer inopinément. L'activation des « Go Levers » s'effectue dans le même sens que le sens du mouvement des manettes de poussée lorsqu'elles sont ramenées, ou dans le même sens du mouvement des doigts lorsqu'on agrippe les manettes de poussée.
2.6.3 Surdose d'information du commandant de bord
La performance du commandant de bord suggère que ce dernier subissait une surdose d'information lorsqu'il a constaté que l'appareil était en mode « Go Around ».
Le stress du commandant de bord a commencé à augmenter au début du vol :
- il effectuait un vol supervisé en présence d'un pilote vérificateur de la compagnie;
- la rotation a été effectuée 44 nœuds au-dessus de la Vr;
- l'exécution d'un virage à 40 pieds au-dessus du sol pour acquérir le cap assigné;
- la vitesse de l'appareil oscillait près de la Vfe en position 15/15 pendant la montée;
- le vol s'effectuait en pilotage manuel;
- le taux de montée était exceptionnel;
- la montée s'effectuait à l'angle de cabrage maximal;
- l'exécution des tâches normales a été perturbée;
- l'alarme de débrayage du PA retentissait;
- la séquence des annonces n'a pas été respectée, ce qui a créé de la confusion dans le cockpit;
- l'appareil avait excédé l'altitude assignée lors de la montée puis passé sous elle en descente;
- le copilote l'avisait prestement de corriger l'assiette de l'appareil;
- l'indication inattendue que l'appareil était en mode « Go Around » a dû exacerber la confusion du commandant de bord;
- et finalement l'appareil accélérait vers la Vmo.
2.6.4 Désorientation spatiale et interprétation des indications relatives à une erreur de l'anémomètre
Du début de la descente jusqu'à la réduction de puissance, l'illusion somatogravique induite par l'accélération de l'appareil pouvait laisser penser que l'avion avait une assiette de cabré alors qu'en fait, il avait une assiette de piqué. La fausse impression d'être en cabré jumelée à l'augmentation de la vitesse de l'appareil peuvent avoir incité le commandant de bord à diagnostiquer une erreur d'indication de l'anémomètre.
La perception erronée d'être en cabré et les forces que le commandant de bord ressentait au manche ont pu empêcher le commandant de bord de tirer encore plus sur le manche et de compenser le THS. En surdose d'information, préoccupé par la vitesse croissante de l'avion et sujet à l'illusion somatogravique, le commandant de bord semble avoir canalisé toute son attention sur la vitesse de l'appareil plutôt que sur l'ensemble des instruments. Cela ne lui permettait pas d'analyser posément la situation. Il est également possible que la récente revue de la procédure en cas d'erreur de l'anémomètre ait biaisé le jugement du commandant de bord en ce sens.
Peu de temps après la reprise de la maîtrise de l'appareil, le commandant de bord a informé l'ATS qu'il croyait à une erreur d'indication des anémomètres. Dans les faits, aucune donnée de vol ne permettait de penser que la vitesse affichée sur le PFD était erronée. L'observation des divers instruments de vol aurait écarté une anomalie de l'anémomètre. La vitesse augmentait, l'assiette était en piqué et l'altimètre décroissait.
2.6.5 Incapacité du commandant de bord à réagir aux annonces du copilote
Peu après le début de la descente, le copilote a averti à deux reprises le commandant de bord que l'assiette n'était pas conforme au profil de vol désiréFootnote 59. L'assiette normale en palier à 250 nœuds est d'environ 2,5° en cabré. Les annonces du copilote pour corriger l'assiette ont été faites pendant que le commandant de bord était surchargé. Comme le commandant de bord a ni répondu aux avertissements ni agi pour corriger la situation, le copilote a conclu que le commandant de bord souffrait d'une incapacité. On peut penser qu'en surdose d'information, le niveau de concentration du commandant de bord était tel qu'il est resté immobile face aux demandes pressantes du copilote. Le copilote a informé le commandant de bord qu'il prenait les commandes de l'appareil. La décision du copilote était justifiée et conforme aux procédures établies. Par la suite, comme le commandant de bord a réagi aux stimuli et était rationnel, on peut conclure qu'il n'a pas subi une incapacité physiologique.
2.6.6 Reprise des commandes de l'appareil par le copilote
Pour les raisons citées au paragraphe 2.5.4, le copilote n'a pas réalisé que l'appareil était dans une condition non compensée lorsqu'il a pris les commandes. Le taux de descente était d'environ 1640 pi/min, l'avion avait une assiette de piqué de 2,4°, la vitesse en hausse était de 259 nœuds et l'altitude était de 2610 pieds en décroissant. Afin de corriger la situation, il a réduit la poussée, débrayé l'automanette et tiré sur le manche, sans toutefois compenser avec le compensateur électrique ou le compensateur manuel. La réduction de poussée a augmenté l'angle de piqué. Étant donné que les moteurs des A310 sont sous les ailes, la poussée motrice crée un effet de balancier; une diminution de poussée génère un moment en piqué, tandis qu'une augmentation de poussée crée un moment en cabré. En conséquence, malgré les efforts au manche du copilote, l'assiette est passée de 2,4° en piqué à 4,2° en piqué, et la vitesse de l'appareil a continué d'augmenter.
Pendant la descente, la première alarme sonore de survitesse a retenti, ainsi que l'alarme de l'avertisseur d'altitude, et l'alarme visuelle et sonore de débrayage du PA (cavalry charge). Dans un tel environnement, et voyant que malgré des efforts substantiels au manche, l'appareil en rapprochement avec le sol ne se redressait pas, le niveau de stress de l'équipage de conduite a augmenté radicalement. Étant donné qu'il était en mesure de déplacer le manche quelque peu et que le volant de trim était immobile, le copilote a rejeté la possibilité qu'un emballement du compensateur ou qu'un blocage de gouverne de profondeur était à l'origine du problème. Les facteurs suivants ont pu contribuer à confondre le copilote sur la condition non compensée de l'appareil :
- il venait de prendre les commandes de l'appareil après avoir jugé que le commandant de bord était atteint d'une incapacité;
- il n'a pas réalisé que le compensateur électrique avait atteint la butée en piqué lors de la montée;
- aucune indication autre que l'indicateur de position de trim ne suggérait que le THS avait atteint sa butée.
2.6.7 Procédures relatives aux difficultés en tangage
Incapable de redresser le nez de l'appareil, le copilote était confronté à un problème de maîtrise en tangage. La vitesse de l'avion a augmenté parce que l'appareil avait une assiette de piqué. Puisque l'effort au manche est en partie fonction de la vitesse, il devenait de plus en plus difficile de tirer sur le manche sans l'utilisation du compensateur électrique ou manuel. Les efforts du copilote sur le manche auraient dû l'amener à exécuter, soit la procédure « Elevator Jam or High Pitch Force », soit la procédure « Abnormal Pitch Behavior or Pitch Trim Runaway ». Compte tenu du cadre temporel, le copilote devait exécuter de mémoire les éléments de la procédure choisie. L'élément fondamental de ces procédures est l'utilisation du compensateur horizontal pour contrôler le tangage de l'appareil. Étant donné que les deux procédures requièrent l'utilisation du compensateur, l'exécution de l'une d'elles aurait rééquilibré l'appareil et annulé les efforts au manche.
Le copilote n'a pas voulu se servir du compensateur parce qu'il craignait que son utilisation aggrave la situation. Cette décision s'appuyait sur une perception erronée que l'usage du compensateur dans des situations anormales avait été un facteur dans des accidents d'A310. Cette perception semble avoir été renforcée par ses observations dans le simulateur à la suite de perte de contrôle lors de tentative de maîtriser le tangage avec le compensateur lors d'un blocage de gouverne de profondeur. Il était également convaincu qu'il pourrait surmonter l'effort au manche sans utiliser le compensateur. En conséquence, le copilote s'est concentré à tirer sur le manche pour arrêter la descente sans contempler la possibilité que l'appareil était dans une condition non compensée.
2.6.8 Performance de l'équipage
Réagir avec précision et rapidité à une situation rare et inhabituelle comme la perte de maîtrise d'un appareil demande une évaluation efficace de la situation. Compte tenu du manque de données CVR, il n'est pas possible d'évaluer l'interaction entre les membres de l'équipage. Par ailleurs, en s'appuyant sur les données FDR, les témoignages et les bandes ATS on peut brosser un tableau général de la performance des pilotes.
Une gestion des ressources en équipe efficace requiert que les pilotes conviennent d'un plan commun après avoir bien saisi la situation. Puisque l'événement est survenu relativement près du sol, l'équipage disposait de peu de temps pour identifier le problème puis déterminer et pondérer les options de façon coordonnée.
Ni le commandant de bord ni le copilote n'étaient conscients de la situation. À ce propos, le commandant de bord n'a pas réalisé que l'appareil accélérait vers le sol; il croyait plutôt que la vitesse indiquée était erronée, tandis que le copilote ignorait que l'appareil était dans une condition non compensée.
Au début de l'événement, les pilotes n'ont pas travaillé en équipe pour résoudre le problème. Les indices appuient la possibilité que les pilotes aient exercé des forces opposées sur le manche. Étant donné que le commandant de bord soupçonnait que l'anémomètre indiquait une vitesse plus élevée que la vitesse réelle de l'avion, il est possible que le commandant de bord ait voulu restreindre le déplacement du manche vers l'arrière afin d'éviter un décrochage. Cette confusion a perduré jusqu'au déclenchement du EGPWS.
Si le commandant de bord avait informé le copilote qu'il soupçonnait une erreur d'anémomètre, cela aurait peut-être amélioré la performance dans le poste de pilotage.
Faute de données CVR, il n'a pas été possible d'établir avec exactitude quand la première tentative de coordination entre les pilotes a eu lieu. Les seules communications entre les pilotes enregistrées lors de l'événement sont les transmissions accidentelles du copilote sur la fréquence de la tour de Québec.
De ces communications, on peut conclure dans un ordre chronologique qu'entre la première alerte du EGPWS et le début de la remontée :
- que les deux pilotes ignoraient totalement la nature du problème;
- qu'un haut niveau de stress régnait dans le poste de pilotage;
- que le copilote demandait de l'aide au commandant de bord;
- que les pilotes ont reconnu un problème de maîtrise en tangage;
- que le commandant de bord tentait de résoudre le problème;
- et que finalement les pilotes coordonnaient leurs efforts et agissaient conjointement.
Bien que l'équipage ait diagnostiqué un problème de tangage, ni le commandant de bord ni le copilote n'a identifié la source du problème. Il est probable que le haut niveau de stress ait affecté la capacité d'analyse de l'équipage. En conséquence, l'équipage n'a pas exécuté la procédure appropriée.
2.6.9 Formation
Les pilotes devaient se référer à leurs expériences et leurs connaissances pour identifier la condition non compensée de l'avion. Or, même si c'était la première fois que les pilotes faisaient face à un problème relié à la maîtrise en tangage, les efforts au manche auraient dû les guider vers l'exécution soit de la procédure « Elevator Jam or High Pitch Force », soit de la procédure « Abnormal Pitch Behavior or Pitch Trim Runaway ». Toutefois, ni l'un ni l'autre n'a su reconnaître les symptômes d'un problème de commandes. Le fait que l'équipage, composé de deux pilotes expérimentés dont un pilote instructeur/vérificateur, n'a jamais posé un diagnostique clair sur l'origine du problème, même après avoir repris la maîtrise de l'avion, laisse penser que la formation à cet égard était déficiente.
La performance de l'équipage suggère que certains éléments de la formation théorique et pratique des pilotes n'ont pas atteint les objectifs visés. À cet égard :
- l'équipage a mal interprété les normes de décollage et a décollé dans des conditions de visibilité inférieure à la limite prescrite par la réglementation en vigueur;
- le commandant de bord a effectué la rotation 44 nœuds au-dessus de la vitesse de rotation;
- le commandant de bord a exécuté un virage à 40 piedsau-dessus du sol immédiatement après que l'avion a pris son envol;
- il y a eu un manque de coordination entre les pilotes;
- l'utilisation du PA n'a pas été optimisée;
- le commandant de bord a diagnostiqué à tort une erreur d'anémomètre puis n'a pas exécuté les tâches de mémoire requises dans une telle situation;
- l'équipage n'a pas su reconnaître que l'appareil était dans une condition non compensée;
- l'équipage n'a pas exécuté les procédures en cas de difficulté de maîtrise en tangage.
2.6.9.1 Formation sur le simulateur de vol
Le simulateur d'entraînement a pour rôle d'améliorer la sécurité en évitant de placer des équipages dans des situations à risque avant qu'ils n'y soient préparés. Air Transat utilise un simulateur de vol de niveau C qui reproduit les performances du A310-221. Comme les moteurs des A310-308 exploités par la compagnie sont plus puissants que ceux du simulateur, les performances du simulateur sont inférieures à celles des A310 d'Air Transat. Il faut toutefois noter que les différences entre le simulateur et l'A310-308 ont été jugées acceptables par Transports Canada qui a approuvé son utilisation pour la formation des pilotes d'Air Transat. D'ailleurs, le programme de formation d'Air Transat prend compte de ces différences.
Par ailleurs, on ne peut pas écarter la possibilité que les limites du simulateur à reproduire les performances de l'A310-308 aient le potentiel de générer un transfert d'entraînement nul, voire négatif. Dans le cas qui nous occupe, les performances du C-GPAT lors de la course au décollage et de la montée ont nettement été supérieures à celles pouvant être reproduites par le simulateur. En conséquence, les pilotes n'ont pas pu être exposés à de telles performances lors de leur formation. Les performances inhabituelles réduisaient considérablement la séquence d'exécution des tâches normales, ce qui a complexifié la gestion du vol. L'équipage a dû suspendre certaines tâches pour en exécuter d'autres. Ces perturbations ont provoqué des erreurs à l'origine de la condition non compensée de l'appareil. La décision d'exécuter un virage à 40 pieds au-dessus du sol peut également avoir causé des perturbations. De plus, dans le cadre d'une formation continue, les équipages de la compagnie ne pourront pas bénéficier de l'apport pédagogique de reproduire dans le simulateur les conditions qui ont mené à l'événement.
Durant la formation en simulateur, un scénario comportant un blocage de gouverne de profondeur au décollage familiarise les pilotes à l'exécution de la procédure « Elevator Jam or High Pitch Force ». Toutefois, un phénomène de forces élevées en tangage dans un contexte autre qu'au décollage n'est pas reproduit en simulateur. En ce qui concerne la formation en cas de comportement anormal en tangage ou en cas d'emballement du compensateur en tangage, la procédure « Abnormal Pitch Behavior or Pitch Trim Runaway » ne peut pas faire l'objet d'exercices en simulateur puisque le simulateur ne peut simuler cette anomalie. Par conséquent, la formation en simulateur concernant une difficulté de maîtrise en tangage ne permettait pas aux pilotes de s'appuyer sur une expérience contextuelle pour évaluer la situation.
Les essais dans le simulateur de vol utilisé par la compagnie ont révélé que le simulateur avait le potentiel de générer un transfert d'entraînement négatif. À une vitesse supérieure à 250 nœuds avec le compensateur en position neutre ou en piqué, les efforts au manche étaient significativement moins élevés dans le simulateur qu'ils devaient l'être. En conséquence, le réglage du simulateur peut laisser penser que les efforts au manche peuvent être surmontés sans utiliser le système de compensation.
Il est reconnu qu'un pilote atteint d'une incapacité totale ou légère peut gêner involontairement le déplacement des commandes de vol. Même si le copilote croyait que le commandant de bord bloquait le manche suite à une incapacité, il n'a pas utilisé le compensateur horizontal pour diminuer la force qu'il devait exercer pour tirer sur le manche. Pour cette raison, on peut penser que les scénarios de formation en cas d'incapacité n'ont pas préparé le copilote à prendre toutes les mesures nécessaires pour garder la maîtrise de l'avion.
L'enquête n'a pas permis de déterminer si le commandant de bord avait restreint le déplacement du manche. Cependant, puisque le commandant de bord soupçonnait que l'anémomètre indiquait une vitesse plus élevée que la vitesse réelle de l'avion, il est possible qu'il ait voulu restreindre le déplacement du manche vers l'arrière afin d'éviter un décrochage.
Étant donné que l'incident s'est produit près du sol, l'effet du stress lié au temps a pu précipiter chacun des pilotes à poser un diagnostic erroné sur l'origine du problème. Ces diagnostics ont créé un préjugé chez les pilotes qui a contribué à ignorer les indices critiques qu'étaient les efforts au manche.
2.7 La remontée
La descente a duré environ 54 secondes pendant laquelle la vitesse de l'appareil est passée de 209 nœuds à 359 nœuds. Étant donné que l'appareil accélérait vers la Vmo, les efforts au manche ont augmenté significativement. Bien que le copilote ait exercé une pression sur le manche qui oscillait autour de 50 daN avec des pointes de 80 daN, la position de la gouverne de profondeur n'a atteint que la moitié environ de sa déflexion maximale. Puisque la gouverne de profondeur pouvait se déplacer jusqu'à 15° en cabré, on peut conclure que les forces générées par le calculateur FLC excédait la capacité physique du copilote à déplacer la gouverne de profondeur de manière à arrêter la descente.
Lorsque le copilote a pris les commandes, la position du THS était de 1,8° en piqué. Par la suite, la mise en marche automatique du Vc trim et six activations du compensateur électrique ont déplacé le THS à 1,2° en piqué sur une période de 40 secondes. Il est raisonnable de penser que le copilote a appuyé par inadvertance sur le commutateur du compensateurFootnote 60 lorsqu'il tentait de redresser le nez de l'avion, puisque les activations étaient de courte durée, alors qu'on peut penser qu'une activation consciente du compensateur aurait été soutenue afin d'alléger les efforts considérables au manche.
Pendant la descente initiale, la déflexion de la gouverne de profondeur (de 7° à 8,7° en cabré) ne permettait pas de contrer la position du THSFootnote 61 et d'arrêter la descente. Ce n'est que lorsque le Vc trim et le compensateur électrique ont déplacé le THS à moins de 1,2°en piqué, que la conjugaison des efforts du copilote à déplacer la gouverne de profondeur à environ 7° en cabré et l'augmentation de la puissanceFootnote 62 ont pu générer un moment en tangage suffisant pour arrêter la descenteFootnote 63 à environ 995 pieds agl.
L'enquête a donné lieu aux rapports de laboratoire du BST suivants :
- LP 014/2009 – Simulator Control Force Evaluation;
- LP 043/2008 – DFDR/CVR Analysis;
- LP 086/2008 – EGPWS Download.
On peut obtenir ces rapports en s'adressant au Bureau de la sécurité des transports du Canada.
Faits établis
3.1 Faits établis quant aux causes et aux facteurs contributifs
- Le briefing avant le décollage n'a pas pris en compte les éléments qui ont contribué aux performances de montée exceptionnelles de l'aéronef; en conséquence, le briefing n'a pas amélioré la cohésion dans le poste de pilotage comme il aurait dû le faire.
- À la suite du débranchement du casque d'écoute du copilote, l'annonce « Rotate » a été manquée pendant la course au décollage. L'appareil a quitté le sol à 182 nœuds, soit 44 nœuds au-dessus de la vitesse de rotation calculée par l'équipage.
- Les actions requises pour suivre la trajectoire et le profil de montée ont contribué à surcharger l'équipage et ont donné lieu à des erreurs. La séquence des actions et des annonces normalisées lors de la montée a été bouleversée. En conséquence, l'équipage n'a pas sélectionné la poussée de montée (CL) sur le thrust rating panel (TRP).
- Lors de la mise en palier à 3000 pieds, le commandant de bord a actionné le compensateur électrique jusqu'à ce que le plan horizontal réglable (THS) atteigne la butée électrique en piqué. En conséquence, l'appareil a été placé dans une condition non compensée.
- Afin de réduire la vitesse de l'appareil, le commandant a ramené les manettes de poussée. Cependant, il a appuyé sans s'en rendre compte sur les « Go Levers ». Le mode « Go Around » s'est activé, la puissance a augmenté au maximum, et la vitesse de l'appareil a continué d'augmenter.
- Le passage inattendu en mode « Go Around » a déconcerté le commandant de bord à un moment où sa charge de travail était élevée. En surdose d'information, et préoccupé par la vitesse croissante de l'avion et sujet à l'illusion somatogravique, le commandant de bord a canalisé toute son attention sur la vitesse de l'appareil plutôt que sur l'ensemble des instruments. En conséquence, le commandant de bord n'a pas réalisé que l'appareil accélérait vers le sol, mais croyait à tort que la vitesse indiquée était erronée.
- Le commandant de bord n'a pas réagi aux avertissements du copilote voulant que l'assiette n'était pas conforme au profil de vol désiré. En conséquence, le copilote a pris les commandes de l'avion sans reconnaître que ce dernier était dans une condition non compensée.
- Lorsqu'il a pris les commandes de l'avion, le copilote n'a pas réalisé que l'appareil était dans une condition non compensée malgré les efforts exceptionnellement élevés au manche. Par conséquent, le compensateur horizontal n'a pas été utilisé pour alléger les forces au manche.
- En raison de la proximité du sol, l'équipage disposait de peu de temps pour identifier le problème puis déterminer et pondérer les options et coordonner leurs efforts. Par conséquent, l'effet du stress lié au temps a pu précipiter chacun des pilotes à poser un diagnostic erroné sur l'origine du problème.
- La performance de l'équipage suggère que certains éléments du programme de formation de la compagnie n'ont pas atteint les objectifs visés quant à la coordination des membres de l'équipage, la réglementation concernant les limites de décollage, la reconnaissance d'une condition non compensée, l'usage du pilote automatique et la compréhension et l'application des procédures anormales.
3.2 Faits établis quant aux risques
- Les différentes définitions de piste contaminée présentées aux pilotes peuvent créer de la confusion quant à la sélection des vitesses au décollage, résultant potentiellement en une sélection de vitesses inappropriées pour les conditions de piste.
- Le contrôleur de l'aéroport n'a pas aidé l'aéronef suite au premier message « PAN PAN » du vol TSC211. Le manque de familiarité du contrôleur avec la phraséologie de détresse a contribué à sa réaction face à la déclaration de la situation d'urgence de l'équipage.
- Les essais dans le simulateur de vol utilisé par la compagnie ont révélé que le simulateur avait le potentiel de générer un transfert d'entraînement négatif.
- À une vitesse supérieure à 250 nœuds avec le compensateur en position neutre ou en piqué, les efforts au manche sont significativement moins importants dans le simulateur qu'ils devraient l'être. En conséquence le réglage du simulateur peut laisser penser que les efforts au manche peuvent être surmontés sans utiliser le système de compensation.
- Un enregistreur d'images aurait permis de documenter les actions des pilotes et l'environnement dans le cockpit, des éléments essentiels à l'évaluation de la performance de l'équipage. Ce qui est encore plus important, un enregistreur d'images faciliterait l'identification des problèmes de sécurité, ce qui permettrait d'identifier les mesures nécessaires pour prévenir de futurs événements.
3.3 Autres faits établis
- La description de l'incident fourni dans le rapport d'incident d'Air Transat était inexacte. En conséquence, le début de l'enquête du BST a été retardé.
- Comme les événements reliés à la perte de maîtrise sont survenus 48 minutes avant l'atterrissage, la bande audio associée à l'événement a été oblitérée. Des renseignements importants à la compréhension des faits ont été effacés.
- La procédure en cas d'incapacité d'un membre d'équipage est pratiquée au simulateur uniquement dans le cadre d'une incapacité soudaine et grave lors d'un décollage avec des annonces manquées. Il est donc possible que les conditions entourant une incapacité légère ou incomplète ne soient pas reconnues dans une autre phase de vol.
Mesures de sécurité
4.1 Mesures prises
4.1.1 Mesures prises par Air Transat
Depuis cet accident, Air Transat a pris les mesures de sécurité suivantes :
- La procédure de mise en palier à basse altitude contenue dans la procédure d'utilisation normalisée (SOP) a été modifiée afin de s'assurer que la montée initiale est effectuée en mode PROF (profile) plutôt qu'en mode SRS (système de référence vitesse), réduisant ainsi la charge de travail de l'équipage pendant cette manœuvre.
- Les procédures de la compagnie applicables aux situations de décollage par faible visibilité ont été clarifiées au bénéfice des pilotes vérificateurs de la compagnie.
- Des lignes directrices sur l'embrayage du pilote automatique après le décollage ont été ajoutées aux SOP.
- Le programme de formation des pilotes a été modifié pour inclure une trousse de formation technique et pratique complète sur la récupération en cas de perte de maîtrise d'un aéronef (Upset Recovery Training). De plus, un exercice sur la procédure d'urgence en cas de tangage anormal (Abnormal Pitch Behavior emergency procedure) a été ajouté au programme de formation périodique sur simulateur.
- Par suite d'une initiative conjointe, un changement de procédure a été mis en œuvre par NAV CANADA à l'aéroport international de Québec/Jean-Lesage (Québec) éliminant la pratique de transmettre des instructions initiales de départ qui exigent un virage immédiat après le décollage et une réduction de l'altitude de mise en palier.
- La responsabilité de signaler les incidents et accidents d'aviation à déclaration obligatoire au BST a été transférée au Service de sécurité et incorporée aux procédures du système de gestion de la qualité et de la sécurité (QSMS).
4.1.2 Mesures prises par Canadian Aviation Electronics (CAE)
L'examen des données techniques pertinentes effectué par CAE a révélé la présence d'une erreur dans la modélisation de la restitution d'efforts au-delà de 38 mm de déplacement du manche dans le dispositif de sensation artificielle du simulateur. CAE a mis au point le logiciel du simulateur utilisé par Air Transat de façon à permettre à la force du manche de s'accroître, en gradients plus élevés, afin d'obtenir une force de commande supplémentaire plus réaliste de compensation neutre ou en piqué à haute vitesse et basse altitude.
De plus, CAE a décidé de vérifier si les simulateurs d'A300 et d'A310 d'Airbus fabriqués par CAE étaient également touchés par le même problème. Ainsi, le 16 juillet 2010, CAE a rédigé un bulletin technique (FSBT-SIM-438-SW) à l'intention de tous ses clients susceptibles d'être touchés à titre d'exploitant de ces simulateurs. Cela représente environ 10 simulateurs dans le monde. En fonction des réponses reçues des clients jusqu'ici, il semblerait que ces simulateurs sont tous touchés par ce même problème. Par conséquent, CAE assure un suivi officiel de ces questions, sur chacun de ces simulateurs. En outre, CAE effectue des évaluations de ces simulateurs directement avec les clients et elle compte procéder aux mises à niveau au besoin.
Le présent rapport met un terme à l'enquête du Bureau de la sécurité des transports du Canada (BST) sur cet événement. Le Bureau a autorisé la publication du rapport le .
Annexes
Annexe A – Synthèse des événements
Le tableau suivant est une synthèse des événements importants extraits de l'enregistreur des données de vol (FDR), des enregistrements des services de la circulation aérienne (ATS) et du système d'avertissement de proximité du sol amélioré (EGPWS).
| UTC (h:min:s) |
SÉQUENCE DES ÉVÉNEMENTS | IAS (nœuds) |
Alt 29.53 (pi) |
Hauteur radioalti-métrique (pi agl) |
Vitesse enregistrée (pi/min) |
Angle de tangage (°) |
Angle du stabili sateur (°) |
|---|---|---|---|---|---|---|---|
| 19:39:38.4 | Début de la course au décollage | 37.3 | 295 | −1 | 0 | 0 | −1.8 |
| 19:39:55 | Vitesse de rotation est atteinte | 138.0 | 295 | −1 | 0 | 0 | −1.8 |
| 19:40:02.9 | L'appareil débute la rotation | 181.8 | 265 | −1 | −15 | 1.4 | −1.8 |
| 19:40:05.0 | Début du virage à droite | 188.4 | 311 | 40 | 293 | 6 | −1.8 |
| 19:40:18.3 | ALT* mode vertical engagé | 212.8 | 1064 | 897 | 6282 | 18.6 | −1.8 |
| 19:40:24.1 | Le PA no 1 est embrayé | 211.9 | 1668 | 1442 | 6240 | 19 | −1 |
| 19:40:24.4 | Début de la rentrée des volets | 212 | 1770 | 1469 | 6358 | 19 | −1 |
| 19:40:27.5 | Début de la rentrée du train d'atterrissage | 208.6 | 2017 | 1766 | 5920 | 16.8 | −0.7 |
| 19:40:29.1 | Le PA est débrayé | 206.1 | 2168 | 1911 | 5291 | 18.2 | −0.6 |
| 19:40:31.8 | L'angle de tangage commence à diminuer | 198 | 2406 | 2132 | 5383 | 17.1 | 0.1 |
| 19:40:40.9 | Le plan horizontal réglable passe progressivement de 0,3° en piqué à 2,7° en piqué | 197.5 | 3018 | 2632 | 3120 | 8.5 | 0.7 |
| 19:40:44.1 | L'appareil débute sa descente | 208.9 | 3112 | 2685 | 1202 | −2.3 | 2.6 |
| 19:40:46.1 | Activation manuelle du compensateur | 218.2 | 3073 | 2645 | −1060 | −1.1 | |
| 19:40:48.3 | L'appareil descend au-dessous de 3000 pieds asl | 230.3 | 3003 | 2599 | −2063 | −2 | 2.5 |
| 19:40 :52.1 | Activation manuelle du compensateur | 241.9 | 2862 | 2501 | −2068 | −0.06 | 2.5 |
| 19:40:52.2 | Le commandant de bord réduit la puissance en tirant les manettes de poussée. | 242.1 | 2859 | 2499 | −2058 | −0.7 | 2.5 |
| 19:40:53.3 | Le mode « Go Around » est engagé | 244 | 2826 | 2478 | −1718 | −1.9 | 2.3 |
| 19:40:54.3 | Les becs commencent à rentrer | 244 | 2793 | 2454 | −2018 | −2.5 | 2.3 |
| 19:40:55 | Activation manuelle du compensateur | 244.1 | 2760 | 2432 | −1958 | −1.8 | 2.3 |
| 19:40:57.1 | Activation manuelle du compensateur | 248 | 2690 | 2338 | −2117 | −1.1 | 2.0 |
| 19:40:58.3 | L'automanette est désactivée | 252.6 | 2654 | 2312 | −2044 | −1.1 | 1.9 |
| 19:41:00.1 | Première alarme de survitesse: Vfe, Vle | 258.9 | 2607 | 2262 | −1667 | −2.7 | 1.8 |
| 19:41:05.1 | Activation manuelle du compensateur | 277.1 | 2412 | 2099 | −2003 | −2.5 | 1.8 |
| 19:41:19.1 | Activation manuelle du compensateur | 300 | 2082 | 1793 | −1184 | −0.7 | 1.6 |
| 19:41:25.0 | L'angle de tangage passe de 3° en piqué à 7° en piqué | 323.2 | 1970 | 1649 | −1302 | −3.7 | 1.3 |
| 19:41:28.2 | TSC211 Transmission accidentelle sur la fréquence de la tour de Québec | 341.2 | 1826 | 1480 | −3117 | −5.2 | 1.2 |
| 19:41:28.6 | Alerte GPWS « Sink Rate » | 342.8 | 1800 | 1454 | −3443 | −4.1 | 1.2 |
| 19:41:29.7 | Alerte de survitesse : Vmo se terminant à 19:41:59.8 | 345.6 | 1730 | 1389 | −3789 | −1.4 | 1.2 |
| 19:41:30.0 | TSC211 Transmission accidentelle sur la fréquence de la tour de Québec | 345.9 | 1714 | 1373 | −3470 | −1 | 1.2 |
| 19:41:34.6 | Alertes GPWS « Don't Sink», « Terrain », « Sink Rate »,« Pull Up », « Too Low Terrain » se terminant à 19:41:41.5 | 356.9 | 1540 | 1157 | −2719 | −4.3 | 1.2 |
| 19:41:37.6 | TSC211 Transmission accidentelle sur la fréquence de la tour de Québec |
359.5 | 1411 | 998 | −2356 | 1.6 | 1.2 |
| 19:41:38.8 | L'appareil atteint son altitude minimum de 1393 pieds asl. |
359.3 | 1393 | 995 | −1119 | 2.5 | 1.2 |
| 19:41:42.1 | TSC211 Transmission accidentelle sur la fréquence de la tour de Québec |
363.9 | 1412 | 1009 | 392 | 1.4 | 1.2 |
| 19:41 :44.1 | Activation manuelle du compensateur | 368.0 | 1439 | 1050 | 851 | 3.8 | 1.2 |
| 19:41:46.1 | Activation manuelle du compensateur. L'appareil atteint la vitesse maximum du vol. |
370.0 | 1494 | 1126 | 1725 | 4.8 | 1.1 |
| 19:41:52.6 | TSC211 Transmission accidentelle sur la fréquence de la tour de Québec |
363.1 | 1888 | 1630 | 4316 | 7.3 | 0.8 |
| 19:41:55.3 | TSC211 Transmission accidentelle sur la fréquence de la tour de Québec |
351.2 | 2104 | 1972 | 4539 | 7.7 | 0.8 |
| 19:42:03.7 | TSC211 : « PAN PAN. PAN PAN. PAN PAN. Air Transat, Air Transat 211, Air Transat 211, on a un petit problème, on demande l'altitude en haut de 5000, on demande jusqu'à 10 000 pieds, ok? » |
326.0 | 2857 | 2670 | 5512 | 10.5 | 0.6 |
| 19:42:19.0 | Tour de Québec : « Transat 211, vous êtes toujours avec la tour de Québec. Confirmez sur 118.65? » |
265.8 | 4471 | 4011 | 6456 | 13.6 | −0.2 |
| 19:42:23.6 | TSC211 : « Oui, okay alors 127.85, salut. » | 245.2 | 4890 | 4373 | 4838 | 11.8 | −0.1 |
| 19:42:25.9 | Tour de Québec : « Okay.» | 238.0 | 5066 | 4536 | 4540 | 10.9 | −0.1 |
| 19:42:26.6 | TSC211 : « PAN PAN. PAN PAN. Air Transat 110, Air Transat 110, on a un problème. On déclare une urgence. On a un problème d'indication de vitesse. » |
236.1 | 5122 | 4590 | 4771 | 10.5 | −0.1 |
| 19:42:36.5 | Tour de Québec : « Transat 211, l'altitude à votre discrétion. Vous êtes toujours avec la tour de Québec. » |
224.4 | 5773 | 5216 | 3577 | 10.2 | −0.4 |
Annexe B – Observations faites au nom du Bureau d'Enquêtes et d'Analyses pour la sécurité de l'aviation civile


Annexe C – Sigles et abréviations
- AFS
- système de vol automatique
- agl
- au-dessus du sol
- ALT*
- mode d'acquisition d'altitude
- asl
- au-dessus du niveau de la mer
- ATC
- contrôle de la circulation aérienne
- ATIS
- Service automatique d'information de région terminale
- ATS
- services de la circulation aérienne
- CAE
- Canadian Aviation Electronics
- CAP
- Canada Air Pilot
- CCP
- contrôle de compétence pilote
- CFRI
- coefficient canadien de frottement sur piste
- CL
- puissance de montée
- CVR
- enregistreur de la parole dans le poste de pilotage
- daN
- décanewton
- DFDR
- enregistreur numérique de données de vol
- ECAM
- moniteur électronique centralisé de bord
- EGPWS
- système d'avertissement de proximité du sol amélioré
- ETOPS
- opérations de bimoteurs avec distance prolongée
- FAA
- Federal Aviation Administration (États-Unis)
- FAC
- calculateur FAC (Flight Augmentation Computer)
- FCOM
- manuel d'exploitation de l'équipage de conduite (Airbus)
- FCU
- poste de commande FCU (Flight Control Unit)
- FDR
- enregistreur des données de vol
- FLC
- calculateur FLC (Feel and Limitation Computer)
- FMA
- annonciateur de mode de vol
- FMS
- système de gestion de vol
- FOM
- manuel d'exploitation de la compagnie (Air Transat)
- g
- facteur de charge
- GEQ
- guide d'essais de qualification
- Go Levers
- bouton décollage/remise des gaz
- IAS
- vitesse indiquée
- L/CH
- Level Change
- MANOPS ATC
- Manuel d'exploitation du contrôle de la circulation aérienne
- MAYDAY
- message de détresse
- N1
- vitesse de rotation du compresseur moteur
- NDB
- radiophare non directionnel
- PA
- pilote automatique
- PAN PAN
- message d'urgence
- PF
- pilote aux commandes
- pi/min
- pied par minute
- PFD
- écran principal de vol
- PM
- pilot monitoring
- PROF
- mode profile
- PVA
- pilote vérificateur agréé
- QRH
- manuel de référence rapide
- RAC
- Règlement de l'aviation canadien
- RVR
- portée visuelle de piste
- SGQS
- Système de gestion de la qualité et de la sécurité
- SID
- départ normalisé aux instruments
- SOP
- procédures d'utilisation normalisées
- SPD
- mode de maintien de vitesse
- SRS
- système de référence vitesse
- THS
- plan horizontal réglable
- TOGA
- décollage et remise des gaz
- TRP
- thrust rating panel
- TSC211
- vol 211 d'Air Transat
- V1
- vitesse de décision
- V2
- vitesse de sécurité au décollage
- Vc
- Speed trim
- Vfe
- vitesse maximale volets sortis
- Vle
- vitesse maximale train sorti
- Vmo
- vitesse maximale admissible en configuration de croisière
- Vr
- vitesse de rotation
- Whooler
- signal sonore
- °C
- degré Celsius