NAV CANADA – Centre de contrôle régional de Vancouver
Environs de Kelowna (Colombie-Britannique)
Le Bureau de la sécurité des transports du Canada (BST) a enquêté sur cet événement dans le but de promouvoir la sécurité des transports. Le Bureau n’est pas habilité à attribuer ni à déterminer les responsabilités civiles ou pénales. Le présent rapport n’est pas créé pour être utilisé dans le contexte d’une procédure judiciaire, disciplinaire ou autre. Voir Propriété et utilisation du contenu. Les pronoms et les titres de poste masculins peuvent être utilisés pour désigner tous les genres afin de respecter la Loi sur le Bureau canadien d’enquête sur les accidents de transport et de la sécurité des transports (L.C. 1989, ch. 3).
Résumé
Le 3 janvier 2019, un avion Bombardier DHC-8-402 (Q400) (immatriculation C-FSWE, numéro de série 4517) exploité par WestJet Encore effectuait le vol 3109 (WEN3109) selon les règles de vol aux instruments de l’aéroport international de Calgary (Alberta) à destination de l’aéroport de Nanaimo (Colombie-Britannique). À peu près au même moment, un avion Piaggio P.180 sous immatriculation privée (immatriculation N990RS, numéro de série 1015) exploité par Rainbow Sandals Retail Incorporated effectuait un vol selon les règles de vol aux instruments depuis l’aéroport international de Spokane (État de Washington, États-Unis) à destination de l’aéroport de Kamloops (Colombie-Britannique).
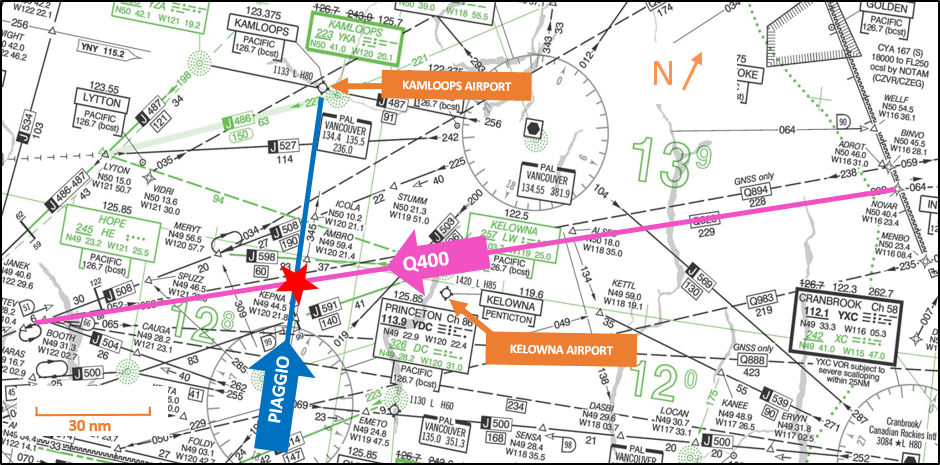
Le Q400 volait en direction sud-ouest en provenance du nord-est de Kelowna (Colombie-Britannique). Le Piaggio volait en direction nord-nord-ouest en provenance du sud de Kelowna. Les 2 avions volaient au niveau de vol 220, et leurs trajectoires de vol devaient se croiser à l’ouest de Kelowna.
À 10 h 21 min 11 s, heure normale du Pacifique, au moment où les 2 avions se trouvaient à l’ouest de Kelowna, il y a eu perte d’espacement lorsque l’espacement vertical minimum de 1000 pieds ou l’espacement latéral minimum de 5 milles marins requis n’a pas été maintenu. À ce moment, les avions volaient à la même altitude sur des trajectoires convergentes à moins de 5 milles marins l’un de l’autre. À 10 h 21 min 20 s, l’équipage de conduite du Q400 a reçu un avis de résolution du système d’alerte de trafic et d’évitement de collisions lui indiquant de descendre, auquel il a obtempéré. À peu près au même moment, le Piaggio P.180 a reçu un avis de trafic. À 10 h 21 min 49 s, il y avait 1000 pieds d’espacement vertical et 0,9 mille marin d’espacement latéral entre les 2 avions. Les 2 vols se sont poursuivis jusqu’à leur destination respective sans autre incident.
1.0 Renseignements de base
1.1 Contexte
L’espace aérien du centre de contrôle régional (ACC) de Vancouver compte plusieurs sous-unités, dont la sous-unité Aéroports. Celle-ci inclut le secteur Kamloops (KA) et le secteur Kelowna (LW). Au moment de l’événement, comme il n’y avait que quelques aéronefs en approche pour atterrir à l’aéroport international de Kelowna (CYLW), on a consolidé le secteur LW avec le secteur KA pour former le secteur KALW. Voir la section 1.3.2. du présent rapport pour plus d’information sur l’espace aérien de l’ACC de Vancouver.
Les services de la circulation aérienne appliquaient l’espacement de surveillance dans l’espace aérien du secteur KALW.
1.2 Déroulement des vols
Un avion Bombardier DHC-8-402 (Q400) (immatriculation C-FSWE, numéro de série 4517) exploité par WestJet Encore effectuait le vol 3109 (WEN3109) selon les règles de vol aux instruments (IFR) depuis l’aéroport international de Calgary (CYYC) (Alberta), à destination de l’aéroport de Nanaimo (CYCD) (Colombie-Britannique).
À peu près au même moment, un avion Piaggio P.180 sous immatriculation privée (immatriculation N990RS, numéro de série 1015) exploité par Rainbow Sandals Retail Incorporated effectuait un vol IFR depuis l’aéroport international de Spokane (KGEG) (État de Washington, États-Unis), à destination de l’aéroport de Kamloops (CYKA) (Colombie-Britannique).
Le Q400 volait vers le sud-ouest en provenance du nord-est de CYLW. Le Piaggio volait vers le nord-nord-ouest en provenance du sud de CYLW. Les 2 avions volaient au niveau de vol (FL) 220Note de bas de page 1. Leurs trajectoires de vol devaient se croiser à l’ouest de CYLW (figure 1).
1.2.1 Chronologie des faits
À 9 h 46 min 37 sNote de bas de page 2, l’équipage de conduite du Q400 a communiqué avec le contrôleur du secteur KALW pour l’informer que le vol se déroulait au FL 220. Le contrôleur du secteur KALW a accusé réception de ce renseignement.
Sur l’écran du système d’affichage amélioré (EXCDS)Note de bas de page 3,Note de bas de page 4 du contrôleur du secteur KALW, l’entrée de données de vol (FDE)Note de bas de page 5 du Q400 était affichée dans le panneau actifNote de bas de page 6 pour YNY (Enderby)Note de bas de page 7, puisque l’avion était entré dans l’espace aérien du secteur KALW près de YNY. La FDE du Q400 affichait l’information exacte.
Vers 9 h 50, un second contrôleur a commencé à surveiller le poste de contrôleur du secteur KALW en prévision d’un transfert de responsabilité du secteur KALW.
À 9 h 53 min 36 s, la FDE du Piaggio est apparue dans le panneau INBOX à l’écran EXCDS du secteur KALWNote de bas de page 8. La FDE du Piaggio affichait l’information exacte.
À 9 h 53 min 46 s a commencé le transfert de responsabilité des postes au poste de contrôleur du secteur KALW. Durant l’exposé oral, le contrôleur relevé a pointé avec la souris le Q400 sur l’affichage de situation (CSiT)Note de bas de page 9 du Système canadien automatisé de la circulation aérienne (CAATS) et a dit au contrôleur de relève que l’avion effectuait un survol (aéronef transitant par l'espace aérien du secteur KALW sans intention d'atterrir). Après l’exposé oral, le contrôleur de relève a confirmé qu’il avait assumé la responsabilité du contrôle du poste de contrôleur du secteur KALW. Le contrôleur relevé a surveillé le contrôleur du secteur KALW pendant environ 1 minute avant de quitter la salle des opérations.
À 9 h 57 min 57 s, le contrôleur du secteur KALW a déplacé la FDE du Piaggio du panneau INBOX au panneau actif pour l’aéroport de Penticton (CYYF) à l’écran EXCDS, puisqu’après être entré dans l’espace aérien du secteur KALW, le Piaggio allait entrer d’abord dans l’espace aérien de CYYF (figure 2).

Légende
1 Entrée de données de vol (FDE) du Piaggio.
2 Panneau actif pour l’aéroport de Penticton (CYYF).
3 FDE du Piaggio dans le panneau INBOX à l’écran du système d’affichage amélioré (EXCDS); la FDE a été déplacée de ce panneau au panneau actif pour CYYF.
4 Panneau INBOX à l’écran EXCDS.
5 Panneau actif pour YNY (Enderby).
À 10 h, la cible radar du Piaggio est apparue sur le CSiT. À 10 h 14 s, le contrôleur du secteur KALW a remarqué un problème avec la cible radar : le Piaggio affichait en fait 2 cibles radar. L’une d’elles affichait le vol Air Alaska 143 (ASA143) en route vers l’aéroport international Ted Stevens d’Anchorage (PANC) (Alaska, États-Unis), et l’autre affichait N990RS, soit l’immatriculation du Piaggio. La cible radar correcte était celle qui affichait ASA143; cette cible montrait une erreur de disparité CAATSNote de bas de page 10, indiquée par la mention <CT> (figure 3).

À 10 h 54 s, le contrôleur du secteur KALW a communiqué avec le contrôleur de SeattleNote de bas de page 11, qui avait la responsabilité du contrôle du Piaggio.
À 10 h 03 min 40 s, le contrôleur du secteur KALW a déplacé la souris sur l’étiquette de données du Q400 du CSiT; à ce stade, il n’y avait pas encore eu de communication verbale entre le contrôleur et le Q400.
À 10 h 06 min 35 s, le contrôleur de Seattle a communiqué avec le contrôleur du secteur KALW pour coordonner un transfert verbal de responsabilité du contrôle du Piaggio. Le contrôleur du secteur KALW a demandé au contrôleur de Seattle si le transpondeur du Piaggio était réglé au code 3565; le contrôleur de Seattle a répondu par l’affirmative.
Après avoir informé le contrôleur de Seattle que le Piaggio avait été identifié au radar à 10 h 06 min 47 s, le contrôleur du secteur KALW a demandé au contrôleur de Seattle s’il pourrait changer le code de transpondeur du Piaggio dès que l’avion syntoniserait sa fréquence. Le contrôleur de Seattle a acquiescé à cette demande.
À 10 h 07 min 24 s, le pilote du Piaggio a communiqué avec le contrôleur du secteur KALW pour l’informer que le vol se déroulait au FL 220. Le contrôleur du secteur KALW a accusé réception de ce renseignement et a demandé au pilote de régler le transpondeur de l’avion sur le code 3565. À 10 h 07 min 35 s, le pilote du Piaggio a confirmé que le transpondeur de l’avion était réglé sur le code 3565.
À 10 h 13 min 56 s, le pilote du Piaggio a demandé au contrôleur du secteur KALW les renseignements météorologiques pour Kamloops. Le contrôleur du secteur KALW a répondu qu’il les lui transmettrait sous peu.
À 10 h 16 min 27 s, le pilote du Piaggio a demandé une baisse d’altitude au contrôleur du secteur KALW, qui a répondu qu’il autoriserait une baisse d’altitude sous peu. Le contrôleur du secteur KALW voulait corriger l’erreur liée au code de transpondeur du Piaggio avant de transmettre au pilote les renseignements météorologiques pour Kamloops, puis amorcer la descente de l’avion en vue d’une approche pour atterrir à CYKA.
Peu de temps après, vers 10 h 17, le contrôleur du secteur KALW a demandé l’aide du contrôleur KALW relevé, de retour dans la salle des opérations pour une tout autre raison, afin de corriger l’erreur liée au code de transpondeur du Piaggio, car il était lui-même occupé à contrôler les avions dont il avait la responsabilité, à transmettre les renseignements météorologiques et à corriger le code de transpondeur.
Le contrôleur relevé a demandé l’attribution d’un nouveau code de transpondeur au Piaggio par les processeurs de données de vol (FDP) du CAATS. À 10 h 17 min 33 s, le code de transpondeur du Piaggio a changé de 3565 à 2606 dans les FDP du CAATS.
Environ 1 minute et 30 secondes plus tard, le contrôleur relevé a communiqué le nouveau code de transpondeur du Piaggio au contrôleur du secteur KALW, puis est demeuré sur place jusqu’à la transmission du nouveau code de transpondeur au Piaggio pour s’assurer que cette mesure corrigerait l’erreur.
À 10 h 20 min 12 s, une alerte de conflit prévu - trafic (TFC)Note de bas de page 12 est apparue dans les étiquettes de données du Q400 et du Piaggio (l’étiquette de données identifiant le Piaggio en tant que vol ASA143) sur le CSiT du contrôleur du secteur KALW. Le contrôleur du secteur KALW était en communication avec un autre aéronef dont il consultait le plan de vol; il n’a ni vu l’alarme visuelle, ni entendu l’alarme sonore de l’alerte de conflit prévu - trafic.
À 10 h 20 min 58 s, le contrôleur du secteur KALW a ordonné au pilote du Piaggio de changer à 2606 le code de transpondeur de l’avion et lui a dit que son plan de vol présentait des problèmes dans le CAATS. À 10 h 21 min 5 s, le pilote du Piaggio a accusé réception du changement de code de transpondeur et a demandé une 2e fois les renseignements météorologiques pour Kamloops.
À peu près au même moment, l’équipage de conduite du Q400 a remarqué une cible radar (celle du Piaggio) sur son système d’alerte de trafic et d’évitement de collisions (TCAS)Note de bas de page 13. La cible qui s’affichait sur le TCAS se trouvait approximativement à la position 11 h de l’avion, à 6 milles marins (NM) du Q400 en provenance du sud. Une seconde plus tard, le TCAS du Q400 a fourni un avis de trafic (TA) à l’équipage de conduite. La cible qu’affichait le TCAS demeurait approximativement à la position 11 h de l’avion. Elle se trouvait à 5,3 NM de l’avion et continuait de voler vers luiNote de bas de page 14. Le pilote aux commandes du Q400 a demandé au pilote surveillant de s’informer sur la circulation auprès du contrôle de la circulation aérienne.
À 10 h 21 min 7 s, le contrôleur du secteur KALW a informé le pilote du Piaggio qu’il lui transmettrait les renseignements météorologiques et a porté son attention sur un écran secondaire où étaient affichés ces renseignements.
À 10 h 21 min 11 s, l’alerte TFC sur les étiquettes de données du Piaggio et du Q400 est devenue une alerte de conflit (CON)Note de bas de page 15, et une perte d’espacement entre le Piaggio et le Q400 s’est produite. Les avions volaient à la même altitude et à moins de 5 NM l’un de l’autre, alors que la règle exigeait un espacement minimal de 1000 pieds verticalementNote de bas de page 16 ou 5 NM latéralementNote de bas de page 17. Le CSiT a affiché une alarme visuelle et déclenché une alarme sonore, mais le contrôleur du secteur KALW n’a ni vu ni entendu ces alarmes.
Trois secondes plus tard, le contrôleur du secteur KALW a commencé à transmettre les renseignements météorologiques pour Kamloops au pilote du Piaggio.
À 10 h 21 min 20 s, le TCAS du Q400 a fourni à l’équipage de conduite un avis de résolution (RA) lui ordonnant de descendre. Le Piaggio se trouvait alors à 3,9 NM du Q400 et volait directement vers luiNote de bas de page 18.
À 10 h 21 min 21 s, les données de vol et la piste radar du Piaggio correspondaient, et l’information correcte sur l’avion s’est affichée sur le CSiTNote de bas de page 19.
À 10 h 21 min 30 s, en réponse au RA émis par le TCAS, le Q400 a amorcé sa descente. Pendant qu’il franchissait 21 946 pieds d’altitude, le Piaggio se trouvait à 3 NM du Q400 et volait toujours vers lui au FL 220. Il était prévu que le point de rapprochement maximum (CPA)Note de bas de page 20 surviendrait 28 secondesNote de bas de page 21 après que le Q400 eut amorcé sa descente à partir du FL 220. Le TCAS du Piaggio a généré un TA pour le Q400. Le pilote du Piaggio a aperçu le Q400 et est demeuré au FL 220.
À 10 h 21 min 33 s, le contrôleur du secteur KALW a terminé la transmission des renseignements météorologiques pour Kamloops au pilote du Piaggio. Deux secondes plus tard, l’équipage de conduite du Q400 a informé le contrôleur du secteur KALW que son TCAS avait généré un TA et un RA et a signalé qu’il avait le trafic (le Piaggio) en vue. C’était le 1er échange verbal d’information entre l’équipage de conduite du Q400 et le contrôleur dans l’événement à l’étude, puisque la communication de 9 h 46 min 37 s avait eu lieu avec le contrôleur relevé. Sept secondes plus tard, le pilote du Piaggio a indiqué au contrôleur du secteur KALW qu’il apercevait le Q400.
À 10 h 21 min 48 s, le contrôleur du secteur KALW a informé les 2 avions qu’ils pouvaient manœuvrer au besoin. Huit secondes plus tard, l’équipage de conduite du Q400 a informé le contrôleur qu’il avait rétabli l’espacement visuel avec le Piaggio.
À 10 h 21 min 49 s, comme le Q400 était descendu en réponse au RA du TCAS, l’espacement vertical et l’espacement horizontal entre les 2 avions étaient d’environ 1000 pieds et 0,9 NM respectivement. À 10 h 22 min 45 s, l’équipage de conduite du Q400 a demandé au contrôleur du secteur KALW l’autorisation de descendre au FL 200, et le contrôleur a acquiescé.
Après cette perte d’espacement, chacun des 2 avions a poursuivi son vol jusqu’à sa destination sans autre incident.
1.3 Services de la circulation aérienne
1.3.1 Renseignements sur le contrôleur
Le contrôleur de la circulation aérienne dans l’événement à l’étude avait la licence et les qualifications nécessaires pour exercer ses fonctions. Le contrôleur occupait ces fonctions à la sous-unité Aéroports de l’ACC de Vancouver depuis mai 2004.
L’enquête, qui a inclus un examen de l’horaire des postes du contrôleur, a permis de déterminer que la fatigue n’était probablement pas un facteur dans cet événement.
1.3.2 Espace aérien du centre de contrôle régional de Vancouver
L’espace aérien de l’ACC de Vancouver est divisé géographiquement et verticalement en plusieurs sous-unités, elles-mêmes divisées en secteurs. Le secteur KA, qui était consolidé avec le secteur LW au moment de l’événement, fait partie de la sous-unité Aéroports.
L’espace aérien du secteur KA mesure environ 251 NM sur 234 NM et couvre quelque 36 000 NM2 d’espace aérien à diverses altitudes, comme le montre la figure 4. La zone en gris sur la carte est subdivisée verticalement en espace aérien du secteur KA et espace aérien du secteur LW. Le contrôleur du secteur LW contrôle l’espace aérien depuis le sol jusqu’à 13 000 pieds au-dessus du niveau de la mer (ASL) inclusivement, et le contrôleur du secteur KA contrôle l’espace aérien au-dessus de 13 000 pieds ASL jusqu’au FL 250 inclusivement.
Puisque les secteurs KA et LW étaient consolidés, le contrôleur du secteur KALW contrôlait les aéronefs qui volaient selon les règles IFR à destination et au départ de CYKA, mais aussi de CYLW, de CYYF, de l’aéroport international Cranbrook/Canadian Rockies (CYXC), de l’aéroport régional Castlegar/West Kootenay (CYCG), de l’aéroport de Trail (CAD4), de l’aéroport de Vernon (CYVK) et de l’aéroport de Princeton (CYDC). Le contrôleur KALW était également responsable des aéronefs qui transitaient par l’espace aérien.
![Carte de l’espace aérien du secteur KA, qui fait partie de la sous-unité Aéroports du centre de contrôle régional de Vancouver. Remarque : La sous-unité Aéroports porte également le nom de complexe Aéroports. (Source : Adaptée du <em>Vancouver ACC Unit Operations Manual</em> de NAV CANADA [entrée en vigueur le 31 mars 2016], Attachment B: Vancouver ACC Sectorization)](/sites/default/files/fra/rapports-reports/aviation/2019/a19p0002/images/a19p0002-figure-04.png)
Légende
1 Surface jusqu’au FL 250 inclusivement
2 Au-dessus de 13 000 pieds jusqu’au FL 250 inclusivement
3 Au-dessus de 13 000 pieds jusqu’au FL 200 inclusivement
Étant donné la taille de l’espace aérien du secteur KALW, la portée d’affichage du CSiT du contrôleur du secteur KALW était réglée à 280 NM; ainsi, 1 pouce de résolution à l’écran équivalait à 14,3 NM. Ce réglage permettait au contrôleur du secteur KALW d’afficher le secteur au complet, incluant les vols qui s’apprêtaient à entrer dans le secteur (figure 5).

Quand on règle la portée du CSiT à 280 NM, la densité des vols à l’écran peut faire paraître les cibles d’aéronef relativement proches l’une de l’autre (plus d’un vol dans 1 pouce d’écran). Il y avait plusieurs autres aéronefs dans les environs lorsque l’alerte TFC220 s’est affichée dans les étiquettes de données du Q400 et du Piaggio; cet encombrement visuel de l’écran a rendu l’alarme visuelle plus difficile à détecter.
1.3.3 Charge de travail dans le secteur au moment de l’événement
Au moment de l’événement, la charge de travail pour le secteur KALW de la sous-unité Aéroports était lourde et complexe. Le contrôleur du secteur KALW contrôlait et coordonnait les mouvements d’environ 18 aéronefs, et l’EXCDS affichait 13 départs en attente aux aéroports situés dans l’espace aérien du secteur KALW.
Dans les 15 minutes qui ont précédé l’événement, plusieurs situations augmentaient la complexité des opérations. Le contrôleur du secteur KALW avait été informé qu’un aéronef en approche à CAD4 pourrait avoir de la difficulté à atterrir à cause des conditions météorologiques. Il y avait en outre un aéronef en circuit d’attente, en prévision d’une approche pour atterrir à CYCG, qui était aux prises avec des conditions de givrage modéré. En attendant, l’équipage de conduite avait demandé une altitude plus basse à cause du givrage, mais le contrôleur du secteur KALW ne pouvait autoriser cette demande, à cause de l’aéronef en approche à CAD4. Il y avait aussi un aéronef en circuit d’attente à CYKA, qui attendait que 2 autres aéronefs décollent avant de pouvoir effectuer une approche. Durant ces opérations complexes, le contrôleur du secteur KALW tentait de résoudre le problème de code de transpondeur du Piaggio.
Durant les 2 minutes qui ont précédé l’apparition de l’alerte TFC dans les étiquettes de données du Q400 et du Piaggio, il y a eu 12 échanges d’information entre le contrôleur du secteur KALW et les aéronefs dont il avait la charge.
Le contrôleur du secteur KALW a reçu 2 transmissions simultanées d’autres aéronefs ainsi qu’un appel de la tour de Kelowna à peu près au même moment où l’alerte TFC est apparue dans les étiquettes de données du Q400 et du Piaggio sur le CSiT.
Juste après que l’alerte TFC fut apparue et que le contrôleur du secteur KALW eut fini d’échanger avec la tour de Kelowna, le contrôleur a porté son attention sur un aéronef qui avait décollé de CYKA selon les règles VFR et qui demandait une autorisation IFR jusqu’à son aéroport de destination.
1.3.4 Considérations relatives à l’effectif de la sous-unité Aéroports
Les effectifs à la sous-unité Aéroports étaient normaux le jour de l’événement. Les effectifs des secteurs KA et LW peuvent être de 1 contrôleur pour chaque secteur, ou on peut consolider ces secteurs de manière à ce que 1 contrôleur prenne en charge les 2 secteurs. D’après le Vancouver ACC Unit Operations Manual de NAV CANADA, le superviseur d’équipe doit ouvrir des postes de contrôle additionnels ou mettre en œuvre des stratégies de gestion du trafic en prévision d’un accroissement de la charge de travail. À l’inverse, pour utiliser plus efficacement les effectifs, les superviseurs d’équipe doivent fermer des postes de contrôle si la charge de travail diminueNote de bas de page 22.
Lorsque le contrôleur KALW a assumé la responsabilité des secteurs KA et LW consolidés, 30 minutes avant que se produise la perte d’espacement à l’étude, les niveaux de trafic étaient tels qu’il s’estimait capable de contrôler les secteurs consolidés.
1.4 Équipement de contrôle de la circulation aérienne
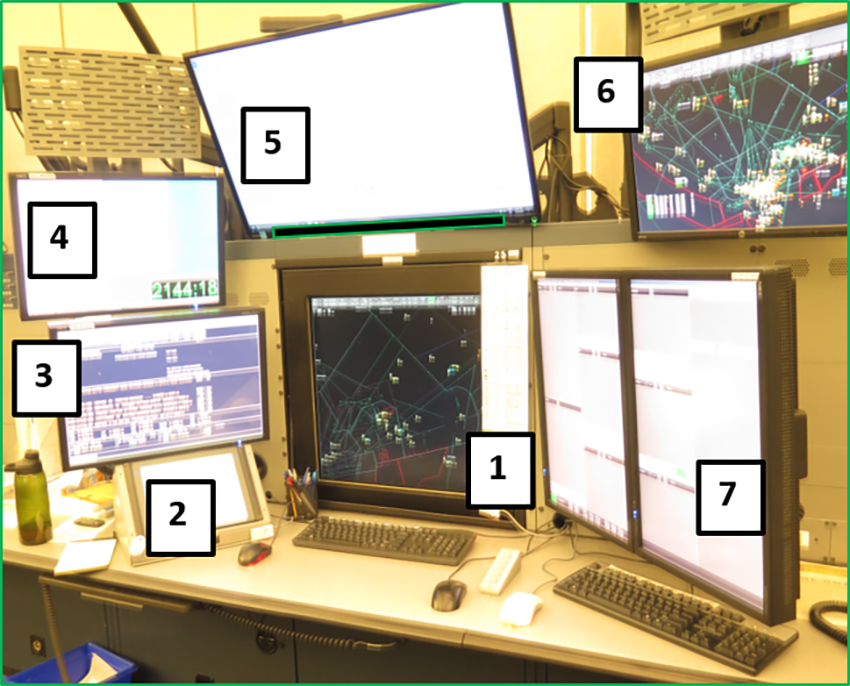
Le poste de travail du secteur KA comprend plusieurs écrans d’affichage pour aider les contrôleurs à surveiller et à diriger les mouvements d’aéronefs, à gérer les communications, et à recueillir de l’information, comme les mises à jour météorologiques, pour aider les pilotes (figure 6).
Légende
1 Affichage de situation (CSiT) du Système canadien automatisé de la circulation aérienne (CAATS)
2 Système de commutation et de commande vocales (VSCS)
3 Écran d’entrée de données météorologiques du système d’affichage amélioré (EXCDS WDE)
4 Système informatisé d’affichage de l’information vidéo (CVIDS)
5 Système d’affichage de l’information de NAV CANADA (NIDS)
6 Affichage homologue
7 Système d’affichage amélioré (EXCDS)
Les principaux affichages dont se servent les contrôleurs sont le CSiT (figure 6, élément 1) et l’EXCDS (figure 6, élément 7); ils sont décrits en détail dans les sections suivantes. Les autres écrans sont les suivants :
- Système de commutation et de commande vocales (VSCS), communément appelé commutation vocale; principale plateforme de communication vocale de la sous-unité Aéroports (figure 6, élément 2);
- Écran d’entrée de données météorologiques du système d’affichage amélioré (EXCDS WDE), qui affiche les renseignements météorologiques (figure 6, élément 3);
- Système informatisé d’affichage de l’information vidéo (CVIDS), qui affiche l’information sur les aéroports, comme les cartes d’approche et les procédures d’urgence (figure 6, élément 4);
- Système d’affichage de l’information de NAV CANADA (NIDS), qui affiche des cartes de régions géographiques particulières (figure 6, élément 5);
- Affichage homologue, qui fournit une vue secondaire du poste de travail polyvalent – contrôleur (figure 6, élément 6).
1.4.1 Système d’affichage amélioré
La sous-unité Aéroports de l’ACC de Vancouver est munie du système EXCDS. Les renseignements que fournit ce système appuient la conscience situationnelle du contrôleur et peuvent aider celui-ci à prédire les conflits.Note de bas de page 23 Le système EXCDS permet également de fonctionner de concert avec d’autres agences et postes de contrôle.
Dans le système EXCDS, chaque aéronef est représenté par une entrée électronique de données de vol (FDE) qui affiche l’information sur l’aéronef (p. ex. identification et type d’aéronef, point de départ, itinéraire, destination et altitude). Les FDE s’affichent sous diverses couleurs : le bleu représente un départ; le brun, une arrivée; le mauve, un survol.
Les FDE des aéronefs qui arrivent à un aéroport de l’espace aérien du secteur KALW, incluant les FDE d’aéronefs qui transitent par cet espace aérien, s’affichent d’abord dans le panneau INBOX à l’écran EXCDS, situé du côté droit de l’écranNote de bas de page 24 (figure 2). Le contrôleur doit manuellement déplacer la FDE du panneau INBOX au panneau actif approprié, à la gauche du panneau INBOX à l’écran EXCDS.
Il y a 2 méthodes pour déplacer les FDE d’un panneau à l’autre : « sélectionner-toucher », et « sélectionner-glisser ». Dans les 2 cas, le contrôleur sélectionne une FDE à déplacer (avec son doigt ou la souris). Avec la méthode « sélectionner-toucher », le contrôleur touche le panneau à l’écran EXCDS où il souhaite déplacer la FDE; avec la méthode « sélectionner-glisser », le contrôleur fait glisser la FDE dans le panneau à l’écran EXCDS où il souhaite la déplacer.
Dès que le contrôleur déplace une FDE dans le panneau actif approprié, une comparaison de sa route et de son altitude avec celles d’autres FDE que le contrôleur a affichées dans les panneaux actifs peut aider ce dernier à cerner les conflits potentiels entre aéronefs avant qu’ils entrent dans l’espace aérien du secteur. Cette tâche peut prendre du temps, surtout quand il y a plusieurs FDE à comparer. Elle dépend en outre de la mémoire de travail du contrôleur (voir la section 1.6.1) et d’une évaluation précise du trafic actuel et futur.
Le contrôleur du secteur KALW n’avait pas l’habitude d’utiliser le système EXCDS pour prédire les conflits entre aéronefs; par conséquent, dans l’événement à l’étude, il n’y a eu aucune comparaison des FDE du Q400 et du Piaggio au moyen du système EXCDS. Habituellement, le contrôleur du secteur KALW se fiait plutôt au CSiT comme principale méthode pour cerner les conflits entre aéronefs. L’écran du système EXCDS était néanmoins compris dans le balayage visuel du contrôleur.
Dans l’événement à l’étude, le Q400 transitait par l’espace aérien du secteur KALW. La FDE du Q400 a été déplacée du panneau INBOX au panneau actif YNY (Enderby) de l’écran EXCDS, parce que c’est dans l’espace aérien aux environs d’YNY que l’avion allait d’abord entrer dans l’espace aérien du secteur KALW. C’est le contrôleur du secteur KALW relevé par le nouveau contrôleur qui avait placé la FDE du Q400 dans le panneau actif YNY.
Le Piaggio entrait dans l’espace aérien du secteur KALW par le sud; ainsi, le contrôleur du secteur KALW a manuellement déplacé la FDE du panneau INBOX au panneau actif pour CYYF (aéroport de Penticton) à l’écran EXCDS, parce que c’est dans l’espace aérien aux environs de CYYF que l’avion allait d’abord entrer dans l’espace aérien du secteur KALW. Même si la FDE était affichée dans le panneau actif pour CYYF, elle était de couleur mauve parce que le Piaggio transitait par cet espace aérien et n’allait pas atterrir à CYYF.
Le système EXCDS sert également à coordonner les mouvements d’aéronefs avec d’autres agences et postes de contrôle, de manière à minimiser les communications verbales nécessaires. Les tours de contrôle et stations d’information de vol situées aux aéroports de l’espace aérien du secteur KALW sont également munies du système EXCDS. Par exemple, lorsque le contrôleur du secteur KALW déplaçait la FDE d’un aéronef qui arrivait à CYKA dans le panneau actif pour CYKA, ce renseignement était visible à l’écran EXCDS de la station d’information de vol à CYKA, pour informer le spécialiste de l’heure d’arrivée prévue de l’aéronef à l’aéroport.
1.4.2 Système canadien automatisé de la circulation aérienne
L’ACC de Vancouver de NAV CANADA est muni du CAATS, un système entièrement redondant qui fonctionne avec 2 processeurs de données de vol (FDP) synchronisés. Le CAATS est également connecté au système EXCDS. Les FDP du CAATS transmettent toutes les données et les mises à jour de plan de vol au système EXCDS. Par exemple, lorsque les contrôleurs actualisent les données de vol d’un aéronef sur leur CSiT, ces mêmes renseignements sont actualisés dans la FDE de l’aéronef dans le système EXCDS.

Le CAATS reçoit des données de diverses sources pour composer le profil de vol d’un aéronef. Les FDP du CAATS fournissent les données de plan de vol d’un aéronef, incluant un code de transpondeur du vol attribué par le CAATS, au système de traitement des données radar réhébergé (RDPSR) pour qu’il fasse la corrélation entre les données de plan de vol et la piste radar d’un aéronef. Les FDP et le RDPSR comparent continuellement les données de plan de vol et la piste radar d’un aéronef. Lorsqu’il y a corrélation entre les données de vol et la piste radar, la cible d’aéronef qui s’affiche sur le CSiT du contrôleur prend la forme d’un polygone (figure 7).
1.4.2.1 Erreur de disparité
Une erreur de disparité CAATS se produit lorsque les FDP du CAATS reçoivent une mise à jour du RDPSR indiquant que la piste radar d’un aéronef dans le RDPSR n’est pas en corrélation avec les données de plan de vol dans les FDP du CAATS.
Dans l’événement à l’étude, les FDP du CAATS avaient attribué le code de transpondeur 3565 au Piaggio, et le transpondeur de l’avion était réglé au bon code. Toutefois, le RDPSR ne parvenait pas à mettre les renseignements en corrélation. La cible du Piaggio sur le CSiT du contrôleur du secteur KALW affichait le vol ASA143 avec un diamant blanc (symbole d’une cible sans corrélation), et son étiquette de données indiquait une erreur de disparité CAATS (<CT>). La cible à la position prévue du Piaggio, d’après les données de plan de vol des FDP du CAATS, s’affichait comme un avion orange, c’est-à-dire une cible non-radar (figure 8).

Environ 10 heures avant l’événement à l’étude, les FDP du CAATS avaient attribué le code de transpondeur 3565 au vol ASA143 qui était en route vers PANC. Le code de transpondeur 3565 serait de nouveau disponible pour attribution par les FDP du CAATS une fois que la responsabilité du contrôle du vol ASA143 aurait été transférée de l’ACC de Vancouver au centre de contrôle de la circulation aérienne en route (ARTCC) d’Anchorage. Environ 10 minutes après le transfert de la responsabilité du contrôle du vol ASA143 à l’ARTCC d’Anchorage, les FDP auraient envoyé un message de suppression du vol ASA143 dans le RDPSR, et le code de transpondeur 3565 aurait pu alors être attribué de nouveau. Cette information aurait également été transmise au système EXCDS, et les FDE du vol ASA143 auraient été supprimées, si le contrôleur ne l’avait pas déjà fait.
Lorsque la responsabilité du contrôle du vol ASA143 a été transférée à l’ARTCC d’Anchorage, les FDP du CAATS étaient hors ligne pour permettre l’installation d’un nouveau logiciel. Par conséquent, ils n’ont transmis au RDPSR aucun message de suppression du vol ASA143 dans le RDPSR. Ainsi, le numéro de vol ASA143 est demeuré associé au code de transpondeur 3565 dans le RDPSR, même après le transfert de la responsabilité du contrôle de ce vol à l’ARTCC d’Anchorage.
Pour certaines mises à jour logicielles aux FDP du CAATS, les 2 processeurs doivent être hors ligne simultanément. Cette situation entraîne la suppression de toutes les données de plan de vol dans les FDP au redémarrage.
Quand les 2 FDP du CAATS sont simultanément hors ligne, les contrôleurs actualisent les données de plan de vol d’un aéronef dans les FDE du système EXCDS. Ainsi, le système EXCDS reflétera l’information de vol exacte d’un aéronef au redémarrage des FDP, et les données de plan de vol courantes dans le système EXCDS mettront alors à jour les FDP du CAATS en y téléchargeant tous les plans de vol courants et tous les changements qui ont été apportés aux plans de vol pendant que les FDP étaient hors ligne.
Après le redémarrage des FDP, la procédure prévoit en outre une synchronisation des FDP du CAATS et du RDPSR. Un coordonnateur de systèmes de données (CSD) doit supprimer manuellement toutes les données de plan de vol du RDPSR avant toute synchronisation des FDP et du RDPSR pour s’assurer que les données de plan de vol sont actualisées et exactes. Cette suppression élimine tous les vols courants dans le RDPSR, et la synchronisation les remplace par tous les vols inscrits dans les FDP du CAATS.
Dans l’événement à l’étude, le travail du CSD a été interrompu juste avant qu’il achève l’étape de suppression des données. Durant son absence, un autre CSD a poursuivi la procédure, sans toutefois effectuer l’étape de suppression.
Ainsi, quand on a saisi plus tard les données de plan de vol du Piaggio dans les FDP du CAATS, le code de transpondeur 3565 lui a été attribué parce qu’il était disponible dans les FDP, même si le vol ASA143, 10 heures plus tôt, était toujours lié au code de transpondeur 3565 dans le RDPSR.
Lorsque les FDP du CAATS ont comparé les données de vol du Piaggio à la piste radar du RDPSR, l’étiquette de données de la cible a affiché le vol ASA143 sur le CSiT du contrôleur, accompagnée d’une erreur de disparité CAATS, étant donné l’absence de corrélation de l’information dans les FDP du CAATS et le RDPSR.
Parfois, quand un aéronef entre dans l’espace aérien du secteur KALW en provenance de l’espace aérien de Seattle, il y a des erreurs de code de transpondeur qui font que l’étiquette de données de l’aéronef affiche la mauvaise information. Ces erreurs se produisent habituellement lorsque l’ARTCC de Seattle attribue à un vol un code de transpondeur différent de celui attribué par les FDP du CAATS. Les erreurs de code de transpondeur peuvent également se produire si un pilote saisit le mauvais code dans le transpondeur de son aéronef. Le fait d’attribuer de nouveau le code de transpondeur à l’aéronef corrige normalement cette erreur, et le CSiT du contrôleur affiche une cible en corrélation. On corrige habituellement rapidement ce type d’erreur de code de transpondeur.
Le contrôleur du secteur KALW a présumé que l’erreur d’étiquette du Piaggio était attribuable à l’une de ces 2 situations. Il ne comprenait pas pourquoi le Piaggio continuait d’afficher le numéro de vol ASA143 après que le pilote du Piaggio eut indiqué qu’il avait réglé le code de transporteur de l’avion à 3565. Il n’a pas remarqué le code d’erreur de disparité CAATS <CT> dans l’étiquette de données de l’avion et n’a pas considéré qu’il pouvait s’agir d’une cause possible d’erreur de code de transpondeur.
Les erreurs de disparité CAATS étaient courantes environ 10 ans plus tôt, mais leur fréquence a diminué après la mise en œuvre de la procédure exigeant la suppression des données à la suite d’une mise à jour logicielle. Le contrôleur ne se rappelait pas avoir reçu de formation pour résoudre ce type d’erreur.
1.4.2.2 Détection de conflit à moyen terme
La détection de conflit à moyen terme (MTCD) est un outil de soutien à la décision du CAATS qui aide les contrôleurs à détecter les conflits entre aéronefsNote de bas de page 25. Pour que la MTCD détecte les conflits entre aéronefs, il doit y avoir corrélation entre les données de vol et la piste radar de chaque aéronef, et le profil de vol de chaque aéronef doit être exact.
La MTCD a été mise en œuvre dans l’espace aérien de la sous-unité Aéroports de l’ACC de Vancouver pour détecter les conflits entre les aéronefs qui volent au FL 190 et au-dessus. Dans cet espace aérien, la MTCD examine les conflits entre aéronefs lorsqu’ils se trouvent à moins de 10 minutes de vol l’un de l’autreNote de bas de page 26.
Dans l’événement à l’étude, le profil de vol du Piaggio était inexact, étant donné l’absence de corrélation entre ses données de plan de vol et sa piste radar. La MTCD n’a détecté aucun conflit entre le Piaggio et le Q400 (il n’a pas été prévu pour ça), malgré la corrélation des données de vol et de la piste radar du Q400 et l’exactitude de son profil de vol.
La mise à jour automatique des données de plan de vol du CAATS, y compris les FDE de l’aéronef dans le système EXCDS, est impossible en cas de non-corrélation du code de transpondeur d’un aéronef. De plus, la MTCD est incapable de détecter les conflits entre aéronefs en cas de non-corrélation des données de vol et de la piste radar d’au moins un de ces aéronefs.
Le contrôleur du secteur KALW se fiait habituellement à la MTCD pour détecter les conflits, et il savait de façon générale que le profil de vol d’un aéronef doit être exact pour que la MTCD détecte un conflit entre aéronefs. Toutefois, au moment de l’événement à l’étude, le contrôleur n’a pas compris que la MTCD ne détecterait pas les conflits relativement au Piaggio. Par conséquent, il n’a utilisé aucune méthode secondaire de détection des conflits, comme un balayage visuel plus rigoureux du CSiT ou de l’écran EXCDS pour détecter le trafic potentiel.
1.4.2.3 Alerte de conflit
L’alerte de conflit a été mise en place dans l’espace aérien de la sous-unité Aéroports de l’ACC de Vancouver pour évaluer les conflits potentiels entre les aéronefs identifiés par radar suivis par le RDPSR qui sont affichés sur le CSiT et qui volent à 14 000 pieds et au-dessusNote de bas de page 27.
L’alerte de conflit émet une alerte de conflit prévu - trafic (TFC) au contrôleur lorsque le RDPSR prédit un conflit entre aéronefs qui sont à 2 minutes de vol l’un de l’autre. Une alerte TFC comprend l’altitude à laquelle volent les aéronefs convergents. Dans la figure 9, l’alerte « TFC220 » indique que le système prédit un conflit entre le Q400 et le Piaggio, et qu’ils volent tous les 2 au FL 220.

Si l’espacement n’est pas maintenu et le système prédit un conflit entre des aéronefs, et si les aéronefs sont à 1 minute de vol l’un de l’autre, l’alerte TFC change à CON. Quand une alerte CON s’affiche, c’est qu’il y a perte d’espacement entre 2 aéronefs, comme le montre la figure 10Note de bas de page 28.

Ces 2 alertes, TFC et CON, génèrent une alarme sonore ainsi qu’une alarme visuelle qui s’affiche sur le CSiT du contrôleur.
Dans l’événement à l’étude, le contrôleur du secteur KALW n’a ni vu l’alarme visuelle, ni entendu l’alarme sonore; toutefois, un autre contrôleur qui travaillait à un poste d’exploitation voisin a entendu l’alarme sonore.
1.5 Procédures de contrôle de la circulation aérienne pour alléger la charge de travail
1.5.1 Aide à un collègue
Un contrôleur de la circulation aérienne « peut aider un contrôleur responsable d’un poste d’exploitation, pourvu que l’une des conditions suivantes soit satisfaite : le contrôleur responsable demande de l’aide et précise le type d’aide dont il a besoin; [ou] [le ou la contrôleur(e)] informe le contrôleur responsable de l’aide [qui sera fournie] et [obtienne] son approbationNote de bas de page 29. »
Avant l’événement à l’étude, un autre contrôleur (le contrôleur récemment relevé) a offert son aide au contrôleur du secteur KALW. Cet autre contrôleur avait remarqué que le volume de circulation actuel et prévu avait nettement augmenté depuis qu’il avait été relevé; il a offert son aide au contrôleur du secteur KALW. Le contrôleur du secteur KALW a répondu qu’il n’avait pas besoin d’aide, mais il a demandé au contrôleur relevé de résoudre l’erreur de code de transpondeur du Piaggio.
Après avoir résolu le problème de code de transpondeur du Piaggio, le contrôleur relevé a demandé l’attribution au Piaggio d’un nouveau code de transpondeur par les FDP du CAATSNote de bas de page 30; il a communiqué peu après le nouveau code au contrôleur du secteur KALW. Comme le contrôleur du secteur KALW était occupé et ne pouvait pas immédiatement attribuer le nouveau code de transpondeur au Piaggio, le contrôleur relevé a attendu que le contrôleur du secteur KALW attribue le code au Piaggio pour s’assurer que cette mesure corrigerait bel et bien l’erreur.
Pendant qu’il attendait pour s’assurer que l’erreur liée au code de transpondeur serait corrigée, le contrôleur relevé a offert de l’aide additionnelle au contrôleur du secteur KALW, par exemple en lui conseillant de transférer un aéronef à la fréquence d’un autre secteur. C’est à ce moment que le contrôleur du secteur KALW a informé le contrôleur relevé qu’il accepterait son aide après tout.
Quand le contrôleur relevé a quitté le poste du secteur KALW pour récupérer son casque d’écoute, il a croisé un contrôleur qui reprenait le travail après une pause et lui a demandé d’aider son collègue en ouvrant le secteur LW. La perte d’espacement s’est produite pendant que ce dernier contrôleur ouvrait le secteur LW.
1.5.2 Limitation de service
Il peut arriver que les contrôleurs doivent limiter le nombre d’aéronefs dans leur espace aérien pour s’assurer qu’ils peuvent les contrôler de façon sécuritaire et efficace. Pour ce faire, ils peuvent « demander à un aéronef de rester au sol ou dans les airs [ou] informer un secteur voisin ou une unité voisine qu’une approbation sera exigée avant qu’un aéronef ne soit autorisé à pénétrer dans [leur] zone de responsabilitéNote de bas de page 31 ».
On a rarement eu recours à une restriction des départs des aéroports du secteur KALW.
1.5.3 Supervision des quarts de travail
D’après le document Vancouver ACC Unit Operations Manual, [traduction] « [i]l incombe au superviseur d’équipe de la sous-unité d’ouvrir et de fermer les postes de contrôle en temps opportun, et il/elle répond directement de ces décisions au superviseur de quartNote de bas de page 32 ». Toujours d’après ce manuel [traduction] « [l]e superviseur doit, en prévision des niveaux de trafic attendus, assurer des niveaux de trafic raisonnables, soit en ouvrant des postes de contrôle additionnels, soit, en coordination avec le superviseur de quart, en mettant en œuvre des mesures de gestion du trafic appropriéesNote de bas de page 33 ».
De plus, l’une des responsabilités du superviseur d’équipe consiste à [traduction] « mettre en place et coordonner des restrictions visant la régulation du débit avec le superviseur de quartNote de bas de page 34 ».
Le seul autre poste de contrôle que l’on aurait pu ouvrir pour alléger la charge de travail du contrôleur du secteur KALW était le secteur LW. L’ouverture du secteur LW aurait pu apporter une aide limitée au contrôleur du secteur KALW. En effet, quand le secteur LW est ouvert, les aéronefs qui décollent selon les règles IFR de CYLW, CYYF, CYDC et CYVK sont d’abord pris en charge par le contrôleur du secteur LW. La responsabilité du contrôle passe au contrôleur du secteur KA lorsque les aéronefs montent et approchent de 13 000 pieds ASL. Les aéronefs IFR qui arrivent à CYLW, CYYF, CYDC et CYVK sont d’abord pris en charge par le contrôleur du secteur KA, et le transfert de la responsabilité du contrôle au contrôleur du secteur LW se fait lorsque les aéronefs descendent et approchent de 14 000 pieds ASL.
La limitation du trafic qui entre dans l’espace aérien du secteur KA et la coordination avec les aéroports de l’espace aérien du secteur KA pour retenir au sol les aéronefs au départ sont autant de mesures de gestion de la circulation que l’on aurait pu prendre pour alléger la charge de travail du contrôleur du secteur KALW.
Avant l’événement à l’étude, le superviseur d’équipe avait quitté la salle des opérations pour vérifier un renseignement et était absent au moment où la perte d’espacement s’est produite.
1.6 Facteurs humains
1.6.1 Conscience situationnelle et mémoire de travail
On définit la conscience situationnelle comme étant [traduction] « la perception des éléments dans l’environnement à l’intérieur d’un volume de temps et d’espace, la compréhension de leur signification, et la projection de leur état à court termeNote de bas de page 35 ».
Les contrôleurs de la circulation aérienne doivent créer et entretenir une représentation graphique (image mentale) transitoire et dynamique de l’espace aérien qu’ils contrôlent. L’environnement du contrôleur [traduction] « se caractérise par une séquence continue d’information transitoire qui change constammentNote de bas de page 36 ». Il doit continuellement traiter de l’information transitoire pour s’assurer de conserver l’espacement minimal approprié entre les aéronefs, puis oublier cette information.
Les contrôleurs doivent d’abord percevoir l’information relative à la circulation aérienne sur le CSiT et l’EXCDS. Ils doivent ensuite établir la pertinence de cette information pour cerner les conflits entre les aéronefs, et enfin se servir de cette information pour projeter des états et des événements futurs et s’assurer de maintenir l’espacement requis entre les aéronefs.
Des manquements peuvent se produire à chacun des 3 niveaux de traitement de l’information, en particulier lorsque les ressources de traitement sont limitées, la charge de travail est élevée, ou des distractions perturbent le déroulement des activités continues et entraînent des évaluations de la situation incomplètes ou inadéquates.
1.6.2 Attention et charge de travail
L’exactitude de la conscience situationnelle dépend grandement de l’attention que l’on accorde à différents aspects de l’environnement de travail. La capacité d’une personne de partager son attention est limitée, et une charge de travail accrue peut nuire à la capacité de percevoir et d’évaluer l’information provenant de l’environnement.
La charge de travail dépend du nombre de tâches à accomplir dans un laps de temps donné. Si le nombre de tâches à accomplir augmente, ou si le temps disponible pour les accomplir diminue, la charge de travail augmente. Il y a saturation des tâches quand le nombre de tâches à accomplir dans un laps de temps donné excède les capacités d’une personne à les accomplir, et certaines tâches doivent alors être abandonnées ou reportées.
Une charge de travail accrue peut entraîner un rétrécissement ou une concentration de l’attention. C’est le cas quand une personne fixe son attention sur certains repères ou certaines caractéristiques de son environnement qu’elle tente de traiter, au risque de cesser de surveiller l’ensemble de l’environnement. Dans certains cas, on peut se concentrer involontairement sur de l’information que l’on estime de la plus haute importance. Dans d’autres cas, on peut fixer notre attention sur une certaine information et oublier de reprendre la surveillance d’autres informations. L’une ou l’autre de ces situations peut engendrer une conscience situationnelle inexacteNote de bas de page 37.
Les interruptions ou distractions peuvent prendre le dessus sur d’autres tâches, accroître la charge de travail et détourner l’attention des tâches plus importantes. Ce moment d’inattention peut entraîner l’omission d’une tâche, comme la détection des conflits potentiels, ou l’oubli de corriger la condition ou la configuration anormale qui en découleNote de bas de page 38.
1.6.3 Automatisation et mémoire de travail
Si l’on ne maintient pas notre attention, la mémoire de travail met environ 15 secondes pour oublier l’informationNote de bas de page 39. La mémoire de travail est particulièrement touchée lorsque des événements distrayants ou simultanés détournent notre attention. Même si les contrôleurs de la circulation aérienne peuvent consulter l’état de l’information de vol pertinente des aéronefs affichée sur le CSiT et l’EXCDS, ils se concentrent parfois sur des tâches qui ne relèvent pas du contrôle des aéronefs, comme fournir des renseignements météorologiques à un pilote ou résoudre des problèmes techniques liés au matériel des services de la circulation aérienne.
La perte d’information dans la mémoire de travail augmente elle aussi à mesure que s’accroît la charge de travail. Plus la charge de travail augmente et se devient complexe, plus il devient difficile de se rappeler le plan en cours, comme résoudre un conflit potentiel cerné plus tôt.
Les outils qui appuient la mémoire de travail, comme la MTCD et l’écran EXCDS, aident le contrôleur à traiter l’information en réduisant la charge de travail et en appuyant la mémoire du contrôleur en rapport avec les conditions de circulation immédiates et futures.
Bien que les systèmes automatisés comme la MTCD allègent la demande en ressources dans les environnements à affectations multiples, ils peuvent également inciter les utilisateurs à changer leur méthode de travail. Quand les systèmes automatisés sont fiables, les utilisateurs peuvent en venir à compter sur l’automatisation et à continuer de le faire, même quand les systèmes fonctionnent mal ou sont indisponibles. La confiance excessive dans l’automatisation peut entraîner une réduction de la vigilance et des manquements dans les tâches de surveillanceNote de bas de page 40.
2.0 Analyse
Les contrôleurs de la circulation aérienne doivent créer et entretenir une image mentale transitoire et dynamique des aéronefs qu’ils contrôlent. Une évaluation complète de l’espace aérien dont ils sont responsables dépend fortement de l’information à laquelle ils prêtent attention. La présente analyse examinera comment le développement de l’image mentale qu’avait le contrôleur de la situation, combiné à la charge de travail et aux pratiques de travail du contrôleur, a contribué à une évaluation inexacte et incomplète de la situation qui a mené à la perte d’espacement. L’analyse abordera également le niveau de supervision du secteur au moment de l’événement.
2.1 Conscience situationnelle
Les processeurs de données de vol (FDP) du Système canadien automatisé de la circulation aérienne (CAATS) avaient fait l’objet d’une mise à jour logicielle avant l’événement à l’étude. Or, le coordonnateur de systèmes de données (CSD) n’a pas effectué l’étape de suppression requise pour éliminer manuellement les données de plan de vol du système de traitement des données radar réhébergé (RDPSR) avant de synchroniser les FDP et le RDPSR. Par conséquent, quand on a saisi les données de vol du Piaggio dans les FDP du CAATS, le système a attribué à ce vol un code de transpondeur qui était disponible dans les FDP, mais qui était toujours lié au vol ASA143 antérieur dans le RDPSR. Le code de transpondeur 3565 a ainsi été attribué au Piaggio, ce qui a entraîné une erreur de disparité CAATS.
Le CSD a omis de supprimer manuellement les données de plan de vol du RDPSR, ce qui a causé l’erreur de disparité CAATS liée au Piaggio.
Le contrôleur des secteurs consolidés Kamloops (KA) et Kelowna (LW) (secteur KALW) a déterminé que le problème du code de transpondeur du Piaggio était une erreur de corrélation du code de transpondeur. Normalement, cette erreur se produit quand on attribue à un aéronef un code différent de celui que lui ont attribué les FDP du CAATS, ou quand un pilote fait une erreur en réglant le code de transpondeur.
Quand le pilote du Piaggio a confirmé que son transpondeur était réglé sur le code 3565, le contrôleur s’est trouvé déconcerté, car il attendait un code différent. Le contrôleur du secteur KALW n’était pas familier avec les erreurs de disparité CAATS. Ainsi, il n’a pas remarqué le code d’erreur de disparité CAATS <CT> dans l’étiquette de données de l’avion et n’a pas considéré qu’il pouvait s’agir d’une cause possible d’erreur de code de transpondeur.
À cause de l’erreur de disparité CAATS, l’outil de détection de conflit à moyen terme (MTCD) n’a pas signalé les conflits potentiels du Piaggio au contrôleur du secteur KALW.
Le contrôleur du secteur KALW avait un vague souvenir d’erreurs de disparité CAATS qui s’étaient produites plusieurs années auparavant, et ne se rappelait pas avoir reçu de formation sur leur résolution.
Si les contrôleurs ne sont pas familiers avec les erreurs liées au matériel des services de la circulation aérienne, ils pourraient fixer leur attention sur la résolution d’erreurs au détriment de la surveillance et du contrôle des mouvements des aéronefs, ce qui augmente le risque de conflits de circulation aérienne.
La charge de travail du contrôleur du secteur KALW était lourde et complexe. Il avait la responsabilité d’un grand espace aérien et des mouvements et du contrôle de plusieurs aéronefs, et gérait simultanément 2 situations en cours qui retenaient son attention. L’attention du contrôleur était partagée entre la nécessité de résoudre l’erreur de code de transpondeur et celle de contrôler l’espace aérien.
Le contrôleur ne s’est pas écarté de son plan de départ, soit : résoudre l’erreur de code de transpondeur du Piaggio, transmettre au pilote les renseignements météorologiques pour Kamloops, puis amorcer la descente de l’avion vers l’aéroport de Kamloops (CYKA).
Les interruptions ou distractions peuvent prendre le dessus sur d’autres tâches et détourner l’attention des tâches plus importantes. Ce moment d’inattention peut entraîner l’omission d’une action, comme la détection des conflits potentiels. Le contrôleur était concentré uniquement sur l’erreur de code, ce qui a nui à sa recherche d’information. À ce moment, le contrôleur a détourné son attention pour corriger l’erreur de code et n’a pas évalué l’information de vol du Piaggio afin de détecter tout conflit potentiel avec d’autres aéronefs dans l’espace aérien du secteur KALW. De plus, l’affichage de situation (CSiT) du CAATS était visuellement encombré par le grand nombre de vols à proximité des avions en conflit. Il était donc difficile de lire les détails de plan de vol et l’espacement géographique entre les aéronefs. Alors qu’augmentaient la charge de travail et la complexité, le contrôleur du secteur KALW ne pouvait plus consacrer le temps nécessaire à la correction de l’erreur liée au code de transpondeur du Piaggio. Il a fini par demander l’aide d’un autre contrôleur pour résoudre le problème.
L’examen partiel de l’information de plan de vol, combiné à une charge de travail élevée et un écran CSiT visuellement encombré, a mené le contrôleur du secteur KALW à se faire une représentation mentale incomplète et inexacte de la situation. Ainsi, le contrôleur ignorait que les trajectoires du Piaggio et du Bombardier DHC-8-402 (Q400), qui volaient à la même altitude, allaient bientôt entraîner une perte d’espacement.
2.2 Procédures et technologie de contrôle de la circulation aérienne
Le système d’affichage amélioré (EXCDS) fournit des renseignements qui appuient la conscience situationnelle du contrôleur et qui sont conçus pour aider les contrôleurs à détecter rapidement les conflits potentiels. On utilise également le système EXCDS pour communiquer avec d’autres secteurs et agences de contrôle.
Lorsque le contrôleur a assumé la responsabilité de poste du secteur KALW, le Q400 syntonisait déjà sa fréquence, et son entrée de données de vol (FDE) était affichée dans le panneau actif pour YNY (Enderby) à l’écran EXCDS. Après que la FDE du Piaggio fut apparue dans le panneau INBOX de l’écran EXCDS, le contrôleur du secteur KALW a déplacé cette FDE vers le panneau actif de l’aéroport de Penticton (CYYF).
Les FDE du Q400 et du Piaggio indiquaient que les 2 avions volaient au même niveau de vol (FL) 220 et que leurs routes allaient se croiser à l’ouest de l’aéroport international de Kelowna (CYLW). Le contrôleur du secteur KALW n’a fait aucune comparaison des routes et des altitudes du Q400 et du Piaggio dans le système EXCDS. Il avait l’habitude d’utiliser le système EXCDS principalement pour communiquer avec d’autres agences et secteurs et non pour détecter rapidement les conflits potentiels.
Le contrôleur du secteur KALW dans l’événement à l’étude utilisait rarement le système EXCDS pour détecter rapidement les conflits potentiels, probablement à cause de la charge de travail requise pour évaluer avec exactitude les trajectoires de vol courantes et futures de tous les aéronefs dans le secteur. C’est l’un des facteurs qui ont empêché le contrôleur de détecter le conflit potentiel entre le Piaggio et le Q400.
La MTCD est un outil de soutien à la décision du CAATS qui aide les contrôleurs à détecter les conflits entre aéronefs. La MTCD a été mise en œuvre dans l’espace aérien de la sous-unité Aéroports du centre de contrôle régional (ACC) de Vancouver pour détecter les conflits entre les aéronefs qui volent au FL 190 et au-dessus. La MTCD détecte les conflits entre aéronefs lorsqu’ils sont à moins de 10 minutes de vol l’un de l’autre.
Les systèmes automatisés comme la MTCD allègent la demande en ressources dans les environnements à affectations multiples; ils peuvent également inciter les utilisateurs à changer leur méthode de travail. Cela dit, quand les systèmes automatisés sont fiables, les utilisateurs peuvent en venir à compter sur l’automatisation et à continuer de le faire, même quand les systèmes fonctionnent mal ou sont indisponibles. La confiance excessive dans l’automatisation peut entraîner une réduction de la vigilance et des manquements dans les tâches de surveillance, comme la recherche de toute l’information disponible.
À défaut de corriger le code de transpondeur, la MTCD n’était pas disponible. Le contrôleur du secteur KALW en était venu à compter sur la MTCD, ce qui pourrait avoir nui à sa recherche d’information même quand la MTCD était indisponible. Ainsi, le contrôleur n’a employé aucune autre méthode pour cerner le conflit entre le Piaggio et le Q400.
Dans l’espace aérien de la sous-unité Aéroports, la fonction d’alerte de conflit évalue les conflits potentiels entre les aéronefs que suit le RDPSR, qui sont affichés sur le CSiT, et qui volent à 14 000 pieds et plus.
L’alerte de conflit génère une alarme visuelle sur le CSiT du contrôleur ainsi qu’une alarme sonore lorsque les aéronefs en conflit se trouvent dans les limites de certains paramètres. Elle génère une alerte de conflit prévu - trafic (TFC) visuelle ainsi qu’une alarme sonore lorsque le RDPSR prédit que les aéronefs en conflit sont à 2 minutes de vol l’un de l’autre.
Dans l’événement à l’étude, le contrôleur du secteur KALW a reçu 2 transmissions simultanées d’autres aéronefs ainsi qu’un appel de la tour de Kelowna à peu près au même moment où l’alerte TFC est apparue dans les étiquettes de données du Q400 et du Piaggio sur le CSiT. Une fois l’appel de la tour de Kelowna terminé, le contrôleur a porté son attention sur l’aéronef qui venait de demander une autorisation du contrôle de la circulation aérienne. Le contrôleur a transmis l’autorisation et a communiqué avec 2 autres aéronefs.
Même si le contrôleur du secteur KALW regardait le CSiT, il n’était pas concentré sur le Q400 et le Piaggio; l’alerte visuelle TFC et l’alarme sonore qui l’accompagnait n’étaient pas suffisamment évidentes pour attirer son attention.
Étant donné les multiples tâches qu’effectuait le contrôleur du secteur KALW, il a raté l’alerte visuelle TFC dans les étiquettes de données du Q400 et du Piaggio affichées sur le CSiT ainsi que l’alarme sonore qui l’accompagnait, car elles n’étaient pas suffisamment évidentes pour attirer son attention.
Après que le contrôleur du secteur KALW eut indiqué au pilote du Piaggio de modifier à 2606 le code de transpondeur de l’avion, le pilote du Piaggio a de nouveau demandé les renseignements météorologiques pour Kamloops. Le contrôleur du secteur KALW a porté son attention vers un affichage secondaire à la gauche du CSiT qui affichait les renseignements météorologiques pour Kamloops. Son attention est restée fixée sur l’affichage secondaire durant tout le temps nécessaire pour lire ces renseignements au pilote du Piaggio.
Pendant que le contrôleur du secteur KALW portait son attention sur l’affichage secondaire, l’alerte TFC est devenue une alerte conflit (CON) dans les étiquettes de données du Q400 et du Piaggio sur le CSiT. Le contrôleur n’a ni remarqué ce changement, ni entendu l’alarme sonore qui l’accompagnait.
2.3 Supervision des quarts de travail
Lorsque le contrôleur a pris en charge le poste consolidé KA et LW, 30 minutes avant la perte d’espacement, la charge de travail était raisonnable pour 1 contrôleur. Au cours des 30 minutes qui ont précédé l’événement à l’étude, la charge de travail a continuellement augmenté, à un point tel que lorsque l’événement s’est produit, la charge de travail à la sous-unité Aéroports du secteur KALW était lourde et complexe. Le contrôleur du secteur KALW contrôlait et coordonnait les mouvements d’environ 18 aéronefs, et le système EXCDS affichait 13 départs en attente aux aéroports de l’espace aérien du secteur KALW. De plus, dans les 15 minutes qui ont précédé l’événement, plusieurs situations augmentaient la complexité des opérations.
Il incombe au superviseur d’équipe d’ouvrir et de fermer des postes de contrôle en temps opportun, en prévision des niveaux de trafic attendus. Le superviseur d’équipe doit maintenir des niveaux de trafic raisonnables en mettant en œuvre des mesures de gestion du trafic appropriées, si nécessaire.
L’ouverture plus tôt du secteur LW n’aurait eu qu’une incidence limitée sur la charge de travail du contrôleur du secteur KALW, car le contrôleur LW n’aurait dû prendre en charge qu’une seule arrivée.
Il y avait toutefois d’autres façons d’alléger la gestion du niveau de trafic dans l’espace aérien du secteur KALW, par exemple en limitant les entrées dans l’espace aérien du secteur KALW ou en se coordonnant avec les aéroports de l’espace aérien pour retenir au sol les aéronefs au départ. Or, dans l’événement à l’étude, on n’a pris aucune de ces mesures. On aurait pu également proposer et coordonner plus tôt l’aide d’un second contrôleur afin d’alléger la charge de travail du contrôleur du secteur KALW, avant que le contrôleur relevé offre son aide.
Même si ces possibilités s’offraient au contrôleur du secteur KALW, un contrôleur confronté à une charge de travail élevée et à un trafic complexe pourrait ne pas être en mesure de déterminer s’il peut encore contrôler efficacement et de façon sécuritaire un tel volume de trafic.
Avant l’événement à l’étude, le superviseur d’équipe avait quitté brièvement la salle des opérations pour vérifier un renseignement et n’était pas encore de retour quand la perte d’espacement s’est produite.
Le superviseur d’équipe n’a pas adéquatement surveillé l’évolution de la situation et n’a pas remarqué l’augmentation du niveau et de la complexité du trafic courant et prévu dans l’espace aérien du secteur KALW. Par conséquent, aucune mesure n’a été prise pour alléger la charge de travail du contrôleur du secteur KALW.
Si les superviseurs d’équipe ne surveillent pas adéquatement la charge de travail des contrôleurs dans des situations complexes avec des niveaux de trafic élevés, cette charge de travail pourrait dépasser les limites des contrôleurs, ce qui accroît le risque de conséquences négatives comme une perte d’espacement.
3.0 Faits établis
3.1 Faits établis quant aux causes et aux facteurs contributifs
Il s’agit des conditions, actes ou lacunes de sécurité qui ont causé l’événement ou y ont contribué.
- Le coordonnateur de systèmes de données a omis de supprimer manuellement les données de plan de vol du système de traitement des données radar, ce qui a causé l’erreur de disparité liée au Piaggio dans le Système canadien automatisé de la circulation aérienne.
- À cause de l’erreur de disparité dans le Système canadien automatisé de la circulation aérienne, l’outil de détection de conflit à moyen terme n’a pas signalé les conflits potentiels du Piaggio au contrôleur du secteur consolidé Kamloops et Kelowna.
- L’examen partiel de l’information de plan de vol, combiné à une charge de travail élevée et un affichage de situation du Système canadien automatisé de la circulation aérienne visuellement encombré, a mené le contrôleur du secteur consolidé Kamloops et Kelowna à se faire une représentation mentale incomplète et inexacte de la situation. Ainsi, le contrôleur ignorait que les trajectoires du Piaggio et du Bombardier DHC-8-402 (Q400), qui volaient à la même altitude, allaient bientôt entraîner une perte d’espacement.
- Le contrôleur du secteur consolidé Kamloops et Kelowna dans l’événement à l’étude utilisait rarement le système d’affichage amélioré pour détecter rapidement les conflits potentiels, probablement à cause de la charge de travail requise pour évaluer avec exactitude les trajectoires de vol courantes et futures de tous les aéronefs dans le secteur. C’est l’un des facteurs qui ont empêché le contrôleur de détecter le conflit potentiel entre le Piaggio et le Bombardier DHC-8-402 (Q400).
- Le contrôleur du secteur consolidé Kamloops et Kelowna en était venu à compter sur la détection de conflit à moyen terme, ce qui pourrait avoir nui à sa recherche d’information même quand cet outil était indisponible. Ainsi, le contrôleur n’a employé aucune autre méthode pour cerner le conflit entre le Piaggio et le Bombardier DHC-8-402 (Q400).
- Les multiples tâches qu’effectuait le contrôleur du secteur consolidé Kamloops et Kelowna lui ont fait rater l’alerte de conflit prévu - trafic visuelle dans les étiquettes de données du Bombardier DHC-8-402 (Q400) et du Piaggio sur l’affichage de situation du Système canadien automatisé de la circulation aérienne, de même que l’alarme sonore qui l’accompagnait, car elles n’étaient pas suffisamment évidentes pour attirer son attention.
- Pendant que le contrôleur du secteur consolidé Kamloops et Kelowna portait son attention sur l’affichage secondaire, l’alerte de conflit prévu - trafic est devenue une alerte de conflit dans les étiquettes de données du Bombardier DHC-8-402 (Q400) et du Piaggio sur l’affichage de situation du Système canadien automatisé de la circulation aérienne. Le contrôleur n’a ni remarqué ce changement, ni entendu l’alarme sonore qui l’accompagnait.
- Le superviseur d’équipe n’a pas adéquatement surveillé l’évolution de la situation et n’a pas remarqué l’augmentation du niveau et de la complexité du trafic courant et prévu dans l’espace aérien du secteur consolidé Kamloops et Kelowna. Par conséquent, aucune mesure n’a été prise pour alléger la charge de travail du contrôleur du secteur consolidé Kamloops et Kelowna.
3.2 Faits établis quant aux risques
Il s’agit des conditions, des actes dangereux, ou des lacunes de sécurité qui n’ont pas été un facteur dans cet événement, mais qui pourraient avoir des conséquences néfastes lors de futurs événements.
- Si les contrôleurs ne sont pas familiers avec les erreurs liées au matériel des services de la circulation aérienne, ils pourraient fixer leur attention sur la résolution d’erreurs au détriment de la surveillance et du contrôle des mouvements des aéronefs, ce qui augmente le risque de conflits de circulation aérienne.
- Si les superviseurs d’équipe ne surveillent pas adéquatement la charge de travail des contrôleurs dans des situations complexes avec des niveaux de trafic élevés, cette charge de travail pourrait dépasser les limites des contrôleurs, ce qui accroît le risque de conséquences négatives comme une perte d’espacement.
4.0 Mesures de sécurité
4.1 Mesures de sécurité prises
NAV CANADA a mis en œuvre les mesures de sécurité suivantes depuis l’événement à l’étude :
- La liste de vérification à remplir après une mise à jour logicielle du Système canadien automatisé de la circulation aérienne (CAATS) a été révisée de manière à subdiviser encore les tâches, ce qui pourrait aider la personne qui effectue le travail, ou la personne responsable, à s’assurer que ces tâches ont bien été accomplies. Une étape a été ajoutée à la fin de la procédure pour s’assurer que la personne effectue l’opération obligatoire « Supprimer tout ». La liste de vérification remplie doit désormais être signée, numérisée et jointe au bon de travail aux fins de tenue des dossiers et pour vérifier que les travaux sont achevés.
- Une directive opérationnelle a été transmise à toutes les sous-unités du centre de contrôle régional de Vancouver selon laquelle [traduction] : « On a déterminé que, pour que toutes les alarmes sonores soient évidentes, le volume des alertes du CAATS doit être réglé au minimum au niveau 4. Les contrôleurs doivent régler et enregistrer toutes leurs préférences préétablies au niveau de volume 4 ou plus. »
- Une directive opérationnelle a été émise pour assurer la séparation des secteurs de Kamloops et de Kelowna chaque matin les jours de semaine pendant la durée du trafic de pointe et à d’autres moments, selon les prévisions. Il s’agit d’une mesure préventive pour assurer que les niveaux de trafic demeurent raisonnables et pour atténuer le risque de devoir séparer les secteurs en pleines périodes de volume élevé.
- Une directive opérationnelle a été émise pour fournir aux superviseurs d’équipe la marche à suivre lorsqu’ils doivent s’absenter de la salle des opérations. Cette directive stipule que l’on doit confier à un autre superviseur d’équipe ou à un contrôleur principal la tâche de superviser et de surveiller la charge de travail de la sous-unité.
Le présent rapport conclut l’enquête du Bureau de la sécurité des transports du Canada sur cet événement. Le Bureau a autorisé la publication de ce rapport le . Le rapport a été officiellement publié le .